Content from Why use an HPC System?
Last updated on 2025-03-05 | Edit this page
Overview
Questions
- What is an HPC system?
- How does an HPC system work?
- Why would I be interested in High Performance Computing (HPC)?
- What can I expect to learn from this course?
Objectives
- Be able to describe what an HPC system is
- Identify how an HPC system could benefit you.
What Is an HPC System?
The words “cloud”, “cluster”, and the phrase “high-performance computing” or “HPC” are used a lot in different contexts and with various related meanings. So what do they mean? And more importantly, how do we use them in our work?
Jargon Busting
Your Personal Computer
We are probably all familiar with a laptop or a desktop computer (some call it a PC for Personal Computer). These computers are aimed at individual users and people coding or analysing. Typically each one of us, in the classroom, has our own laptop or a university computer in front of us and we can work independantly of one another. It is good for performaing local and personal tasks but it has limited resources.

Shared Computing Resources
What happens when we want to share resources, like printers or files? In the late 1950s the US military built a network of computers that used modems and normal telephone lines connect to one another. Things have progressed quite a bit since then. Today our computers can talk to one another in several ways. At most universities you might notice that the desktop computers have a wire (called an Ethernet cable) that connects it to the university’s network. Laptops and other devices such as phones and tablets can also connect to networks using WiFi which is a wireless technology using radio waves. However what happens if we want a computer to perform a task which requires much more hardware than what our desktop or laptop can provide us with?
A Larger Computer
One alternative is to build up a computer with very powerful components. The main components of a computer would be its input devices, processor, memory and output devices such a hard drive. Each of these components can be upgraded to more powerful versions. This is somewhat analogous to buying a car. You might decide to buy a car that can take more people so instead of a two seater sports car you would look at a bigger car that can take four, six or eight people. However, a car that can carry eight people will also need a bigger engine because the engine of the smaller car won’t be strong enough to move eight people. Computers can also be specced to accomplish certain tasks, so for some tasks you might need very fast processing power but not so much memory, other jobs might need lots of memory while others might need really big hard drives to store data too.
A big disadvantage of a computer with bigger and better hardware is that its application becomes limited or in some cases using it for other tasks might mean that its use becomes very expensive or it might just not be as suitable anymore. Using the car analogy; you wouldn’t use a bus to take your two children to school on a regular basis. So you might find that quite often a very expensive computer was purchased for a specific project and after completion of the project the computer becomes an extremely expensive ornament standing in a corner gather dust. What is the alternative?
Cloud Systems
How about buying a car suitable to take your children to school on a regular basis and then renting a bus for the odd occasion that you have to take 30 kids to the museum? We now have cloud computing available to be able to fulfil a similar role when the need arises to use a bigger or faster computer. But first, what exactly is cloud computing? Actually it is nothing other than computer networks, as described in the section about Shared Computing Resources, that belong to external organisations and are connected to the Internet so that, in turn, we can also connect to them. And for the privilege of being able to access those computers we will pay a fee - like renting a car. We can specify exactly what we need in terms of the amount of memory, the speed of the processors, the amount of RAM and so forth. So this might be a good solution but, as always, there are loads of ifs and buts … so what if we, as an organisation, make so much use of these computers that we want our very own? Cloud computers will also have certain limitations so that we can’t always get the specifications we want so we might, even if we can’t afford our own, want an alternative to cloud computing.
The Cloud is a generic term commonly used to refer to computing resources that are a) provisioned to users on demand or as needed and b) represent real or virtual resources that may be located anywhere on Earth. For example, a large company with computing resources in Brazil, Zimbabwe and Japan may manage those resources as its own internal cloud and that same company may also utilize commercial cloud resources provided by Amazon or Google. Cloud resources may refer to machines performing relatively simple tasks such as serving websites, providing shared storage, providing web services (such as e-mail or social media platforms), as well as more traditional compute intensive tasks such as running a simulation.
A Cluster or Supercomputer
The term HPC system, on the other hand, describes a stand-alone resource for computationally intensive workloads. They are typically comprised of a multitude of integrated processing and storage elements, designed to handle high volumes of data and/or large numbers of floating-point operations (FLOPS) with the highest possible performance. For example, all of the machines on the Top-500 list are HPC systems. To support these constraints, an HPC resource must exist in a specific, fixed location: networking cables can only stretch so far, and electrical and optical signals can travel only so fast.
The word “cluster” is often used for small to moderate scale HPC resources less impressive than the Top-500. Clusters are often maintained in computing centers that support several such systems, all sharing common networking and storage to support common compute intensive tasks.
Let’s dissect what resources programs running on a laptop require:
- the keyboard and/or touchpad is used to tell the computer what to do (Input)
- the internal computing resources Central Processing Unit and Memory perform calculation
- the display depicts progress and results (Output)
Schematically, this can be reduced to the following:

When Tasks Take Too Long
When the task to solve becomes heavy on computations, the operations are typically out-sourced from the local laptop or desktop to elsewhere. Take for example the task to find the directions for your next vacation. The capabilities of your laptop are typically not enough to calculate that route spontaneously: finding the shortest path through a network runs on the order of (v log v) time, where v (vertices) represents the number of intersections in your map. Instead of doing this yourself, you use a website, which in turn runs on a server, that is almost definitely not in the same room as you are.

Note here, that a server is mostly a noisy computer mounted into a rack cabinet which in turn resides in a data center. The Internet made it possible that these data centers do not require to be nearby your laptop. What people call The Cloud is mostly a web-service where you can rent such servers by providing your credit card details and requesting remote resources that satisfy your requirements. This is often handled through an online, browser-based interface listing the various machines available and their capacities in terms of processing power, memory, and storage.
The server itself has no direct display or input methods attached to it. But most importantly, it has much more storage, memory and compute capacity than your laptop will ever have. In any case, you need a local device (laptop, workstation, mobile phone or tablet) to interact with this remote machine, which people typically call ‘a server’.
When One Server Is Not Enough
If the computational task or analysis to complete is daunting for a single server, larger agglomerations of servers are used. These go by the name of “clusters” or “super computers”.

The methodology of providing the input data, configuring the program options, and retrieving the results is quite different to using a plain laptop. Moreover, using a graphical interface is often discarded in favor of using the command line. This imposes a double paradigm shift for prospective users asked to
- work with the command line interface (CLI), rather than a graphical user interface (GUI)
- work with a distributed set of computers (called nodes) rather than the machine attached to their keyboard & mouse
I’ve Never Used a Server, Have I?
Take a minute and think about which of your daily interactions with a computer may require a remote server or even cluster to provide you with results.
- Checking email: your computer (possibly in your pocket) contacts a remote machine, authenticates, and downloads a list of new messages; it also uploads changes to message status, such as whether you read, marked as junk, or deleted the message. Since yours is not the only account, the mail server is probably one of many in a data center.
- Searching for a phrase online involves comparing your search term against a massive database of all known sites, looking for matches. This “query” operation can be straightforward, but building that database is a monumental task! Servers are involved at every step.
- Searching for directions on a mapping website involves connecting
your
- starting and (B) end points by traversing a graph in search of the “shortest” path by distance, time, expense, or another metric. Converting a map into the right form is relatively simple, but calculating all the possible routes between A and B is expensive.
Checking email could be serial: your machine connects to one server and exchanges data. Searching by querying the database for your search term (or endpoints) could also be serial, in that one machine receives your query and returns the result. However, assembling and storing the full database is far beyond the capability of any one machine. Therefore, these functions are served in parallel by a large, “hyperscale” collection of servers working together.
HPC research examples
Frequently, research problems that use computing can outgrow the capabilities of the desktop or laptop computer where they started:
- A statistics student wants to cross-validate a model. This involves running the model 1000 times — but each run takes an hour. Running the model on a laptop will take over a month! In this research problem, final results are calculated after all 1000 models have run, but typically only one model is run at a time (in serial) on the laptop. Since each of the 1000 runs is independent of all others, and given enough computers, it’s theoretically possible to run them all at once (in parallel).
- A genomics researcher has been using small datasets of sequence data, but soon will be receiving a new type of sequencing data that is 10 times as large. It’s already challenging to open the datasets on a computer — analyzing these larger datasets will probably crash it. In this research problem, the calculations required might be impossible to parallelize, but a computer with more memory would be required to analyze the much larger future data set.
- An engineer is using a fluid dynamics package that has an option to run in parallel. So far, this option was not utilized on a desktop. In going from 2D to 3D simulations, the simulation time has more than tripled. It might be useful to take advantage of that option or feature. In this research problem, the calculations in each region of the simulation are largely independent of calculations in other regions of the simulation. It’s possible to run each region’s calculations simultaneously (in parallel), communicate selected results to adjacent regions as needed, and repeat the calculations to converge on a final set of results. In moving from a 2D to a 3D model, both the amount of data and the amount of calculations increases greatly, and it’s theoretically possible to distribute the calculations across multiple computers communicating over a shared network.
In all these cases, access to more (and larger) computers is needed. Those computers should be usable at the same time, solving many researchers’ problems in parallel.
Break the Ice
Talk to your neighbour, office mate or rubber duck about your research.
- How does computing help you do your research?
- How could more computing help you do more or better research?
Summary
The cloud is a generic term commonly used to refer to computing resources that are a) provisioned to users on demand or as needed and b) represent real or virtual resources that may be located anywhere on Earth. For example, a large company with computing resources in Brazil, Zimbabwe and Japan may manage those resources as its own internal cloud and that same company may also utilize commercial cloud resources provided by Amazon or Google. Cloud resources may refer to machines performing relatively simple tasks such as serving websites, providing shared storage, providing web services (such as e-mail or social media platforms), as well as more traditional compute intensive tasks such as running a simulation.
The term HPC system, on the other hand, describes a stand-alone resource for computationally intensive workloads. They are typically comprised of a multitude of integrated processing and storage elements, designed to handle high volumes of data and/or large numbers of floating-point operations (FLOPS) with the highest possible performance. For example, all of the machines on the Top-500 list are HPC systems. To support these constraints, an HPC resource must exist in a specific, fixed location: networking cables can only stretch so far, and electrical and optical signals can travel only so fast.
The word “cluster” is often used for small to moderate scale HPC resources less impressive than the Top-500. Clusters are often maintained in computing centers that support several such systems, all sharing common networking and storage to support common compute intensive tasks.
- High Performance Computing (HPC) typically involves connecting to very large computing systems elsewhere in the world.
- These other systems can be used to do work that would either be impossible or much slower on smaller systems.
Content from Working on an HPC system
Last updated on 2025-03-08 | Edit this page
Overview
Questions
- How do I log on to an HPC system?
Objectives
- Connect to an HPC system.
- Understand the general HPC system architecture.
Logging In
The first step in using a cluster is to establish a connection from our laptop to the cluster. When we are sitting at a computer (or standing, or holding it in our hands or on our wrists), we have come to expect a visual display with icons, widgets, and perhaps some windows or applications: a graphical user interface, or GUI. Since computer clusters are remote resources that we often connect to over over slow or laggy interfaces (WiFi and VPNs especially), it is more practical to use a command-line interface, or CLI, in which commands and results are transmitted via text, only. Anything other than text (images, for example) must be written to disk and opened with a separate program.
If you have ever opened the Windows Command Prompt or macOS Terminal, you have seen a CLI. If you have already taken The Carpentries’ courses on the UNIX Shell or Version Control, you have used the CLI on your local machine somewhat extensively. The only leap to be made here is to open a CLI on a remote machine, while taking some precautions so that other folks on the network can’t see (or change) the commands you’re running or the results the remote machine sends back. We will use the Secure SHell protocol (or SSH) to open an encrypted network connection between two machines, allowing you to send & receive text and data without having to worry about prying eyes.

Make sure you have a SSH client installed on your laptop. Refer to
the setup section for more details. SSH clients
are usually command-line tools, where you provide the remote machine
address as the only required argument. If your username on the remote
system differs from what you use locally, you must provide that as well.
If your SSH client has a graphical front-end, such as PuTTY or
MobaXterm, you will set these arguments before clicking “connect.” From
the terminal, you’ll write something like
ssh userName@hostname, where the “@” symbol is used to
separate the two parts of a single argument.
Go ahead and open your terminal or graphical SSH client, then log in to the cluster using your username.
Remember to replace userid with your username or the
one supplied by the instructors. You may be asked for your password.
Watch out: the characters you type after the password prompt are not
displayed on the screen. Normal output will resume once you press
Enter.
Where Are We?
Very often, many users are tempted to think of a high-performance
computing installation as one giant, magical machine. Sometimes, people
will assume that the computer they’ve logged onto is the entire
computing cluster. So what’s really happening? What computer have we
logged on to? The name of the current computer we are logged onto can be
checked with the hostname command. (You may also notice
that the current hostname is also part of our prompt!)
What’s in Your Home Directory?
The system administrators may have configured your home directory
with some helpful files, folders, and links (shortcuts) to space
reserved for you on other filesystems. Take a look around and see what
you can find. Hint: The shell commands pwd and
ls may come in handy. Home directory contents vary from
user to user. Please discuss any differences you spot with your
neighbors.
The deepest layer should differ: userid is uniquely yours. Are there differences in the path at higher levels?
If both of you have empty directories, they will look identical. If you or your neighbor has used the system before, there may be differences. What are you working on?
Use pwd to print the
working directory path:
You can run ls to list
the directory contents, though it’s possible nothing will show up (if no
files have been provided). To be sure, use the -a flag to
show hidden files, too.
At a minimum, this will show the current directory as .,
and the parent directory as ...
Nodes
Individual computers that compose a cluster are typically called nodes (although you will also hear people call them servers, computers and machines). On a cluster, there are different types of nodes for different types of tasks. The node where you are right now is called the head node, login node, landing pad, or submit node. A login node serves as an access point to the cluster.
Avoid running jobs on the login node !
As a gateway, it is well suited for uploading and downloading files, setting up software, and running quick tests. Generally speaking, the login node should not be used for time-consuming or resource-intensive tasks. You should be alert to this, and check with your site’s operators or documentation for details of what is and isn’t allowed. In these lessons, we will avoid running jobs on the login node.
The real work on a cluster gets done by the worker (or compute) nodes. Worker nodes come in many shapes and sizes, but generally are dedicated to long or hard tasks that require a lot of computational resources.
All interaction with the worker nodes is handled by a specialized piece of software called a scheduler (the scheduler used in this lesson is called Slurm). We’ll learn more about how to use the scheduler to submit jobs next, but for now, it can also tell us more information about the worker nodes.
For example, we can view all of the worker nodes by running the command sinfo.
PARTITION AVAIL TIMELIMIT NODES STATE NODELIST
dell-gpu up 21-00:00:0 1 idle gpu01
defq* up 2-00:00:00 6 drng sb[019,025,029,062,069,073]
defq* up 2-00:00:00 1 drain sb060
defq* up 2-00:00:00 45 mix sb[001,003-004,006-007,009-012,014-015,017,023,027-028,032-036,038-039,041-045,047,050,053-054,058-059,061,066-068,072,078,084,086,092,104,108,110]
defq* up 2-00:00:00 58 alloc sb[002,005,008,013,016,018,020-022,024,026,030-031,037,040,046,048-049,051-052,055-057,063-065,070-071,074-077,079-083,085,087-091,093-103,105-107,109]
short up 10:00 6 drng sb[019,025,029,062,069,073]
There are also specialized machines used for managing disk storage, user authentication, and other infrastructure-related tasks. Although we do not typically logon to or interact with these machines directly, they enable a number of key features like ensuring our user account and files are available throughout the HPC system.
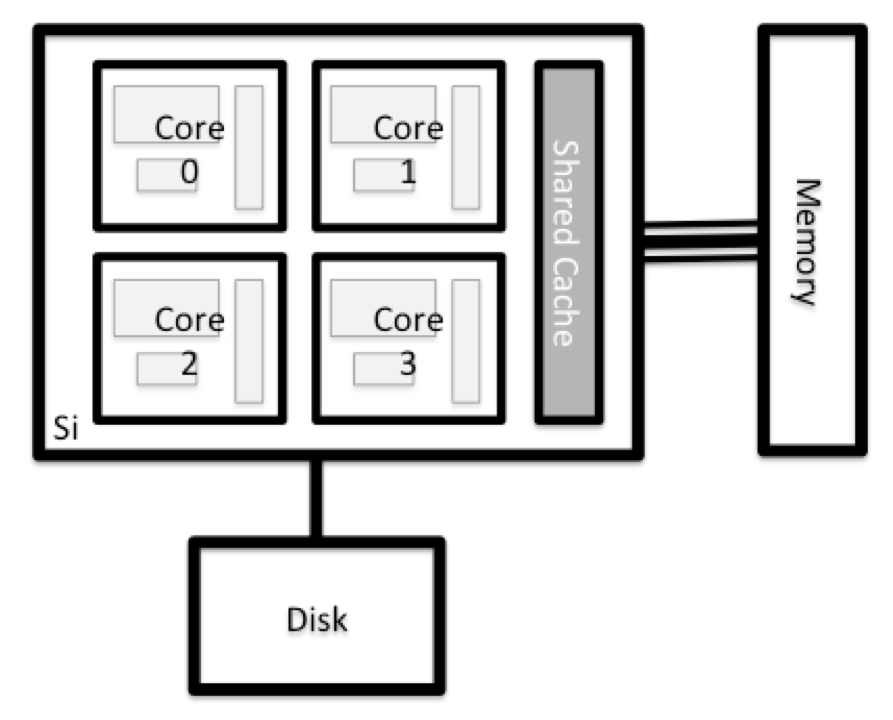
What's in a Node?
All of the nodes in an HPC system have the same components as your own laptop or desktop: CPUs (sometimes also called processors or cores), memory (or RAM), and disk space. CPUs are a computer’s tool for actually running programs and calculations. Information about a current task is stored in the computer’s memory. Disk refers to all storage that can be accessed like a file system. This is generally storage that can hold data permanently, i.e. data is still there even if the computer has been restarted. While this storage can be local (a hard drive installed inside of it), it is more common for nodes to connect to a shared, remote fileserver or cluster of servers.
There are several ways to do this. Most operating systems have a graphical system monitor, like the Windows Task Manager. More detailed information can sometimes be found on the command line. For example, some of the commands used on a Linux system are:
Run system utilities
Read from /proc
Run system monitor
Explore the login node
Now compare the resources of your computer with those of the login node.
Compare Your Computer, the login node and the compute node
Compare your laptop’s number of processors and memory with the numbers you see on the cluster login node and worker node. Discuss the differences with your neighbor.
What implications do you think the differences might have on running your research work on the different systems and nodes?
Differences Between Nodes
Many HPC clusters have a variety of nodes optimized for particular workloads. Some nodes may have larger amount of memory, or specialized resources such as Graphical Processing Units (GPUs).
Filesystems
Home Directory
All users have a home directory on Rocket, you arrive here whenever you log in. Although you may choose to set permissions allowing others to view files in your home directory, files stored here cannot be made available to your project leader or collaborators after you leave, so DO NOT store project work here.
Project Directory
All users on Rocket are members of one or more registered projects,
and each project has a directory on /nobackup for shared
files. For the duration of this course you have been made a member of
the training project. /nobackup/proj/training
Work Directory
Create a directory under our training project directory
to store your work on Rocket. CHECK: Can your collaborators read files
you create?
BASH
mkdir /nobackup/proj/training/userid
cd /nobackup/proj/training/userid/
touch testfile.txt
ls -laOUTPUT
[userid@login01 userid]$ ls -la
total 8
drwx--S--- 2 userid rockhpc_training 4096 Mar 8 20:10 .
drwxrws--- 3 root rockhpc_training 4096 Mar 8 07:42 ..
-rw------- 1 userid rockhpc_training 0 Mar 8 20:10 testfile.txtLinux file permissions are covered in Unix Shell extras.
NOTE: By default a file you create on Rocket will allow ONLY you (the
owner) to read and write to it: -rw-------.
It’s a good idea to change permissions on new files so that your PI
and collaborators can see your work, using chmod (or
chmod -R to recurse through directories). 750
grants read permissions to everyone in your group, 755
grants read permissions to everyone:
or
Local Scratch Space
Home and project directories are accessible across the Rocket
cluster. There is also local space on each node, which can be used for
temporary files and for more efficient I/O during jobs. This space is
only accessible to that node and is always called /scratch.
When you run jobs on the compute nodes, a subdirectory will be created
on /scratch for each job and can be referred to using the
environment variable $TMPDIR. Use this rather than the top
level /scratch. it helps avoid conflicts between jobs and
allows the automatic removal of files when jobs finish. Use of
/scratch can make a significant difference to your
computations’ speed, for example if you:
- Write temporary files that are used only while a computation is running
- Read from or write to a file numerous times during a computation
- Access numerous small files
You can view the local storage on the login node you are working on
with ls /scratch
RDW - Research Data Warehouse
Research Data Warehouse storage has been designed to provide safe, secure, very-large capacity, low-performance storage to Research groups on-campus. This is the best place to store research data, but not intended for interactive use. Working data on rocket should be backed up to RDW. Data to be worked on should first be copied down to working storage (project directory).
RDW is mounted at
/rdw on the login nodes only. Project leaders can request a
share on RDW. For each project, the first 5TB are free, additional space
is charged per TB per year.
Project shares have paths like: /rdw/03/rse-hpc/ and can
also be viewed on campus Windows computers at
\\campus\rdw\rse-hpc.
- The local filesystems (ext, tmp, xfs, zfs) will depend on whether you’re on the same login node (or compute node, later on).
- Networked filesystems (beegfs, cifs, gpfs, nfs, pvfs) will be similar — but may include userid, depending on how it is mounted.
With all of this in mind, we will now cover how to talk to the cluster’s scheduler, and use it to start running our scripts and programs!
- An HPC system is a set of networked machines.
- HPC systems typically provide login nodes and a set of worker nodes.
- The standard method of interacting with such systems is via a command line interface called Bash.
- The resources found on independent (worker) nodes can vary in volume and type (amount of RAM, processor architecture, availability of network mounted filesystems, etc.).
- Files saved on one node are available on all nodes.
- Avoid running jobs on the login node
Content from Working with the scheduler
Last updated on 2025-03-11 | Edit this page
Overview
Questions
- What is a scheduler and why are they used?
- How do I launch a program to run on any one node in the cluster?
- How do I capture the output of a program that is run on a node in the cluster?
Objectives
- Run a simple Hello World style program on the cluster.
- Submit a simple Hello World style script to the cluster.
- Use the batch system command line tools to monitor the execution of your job.
- Inspect the output and error files of your jobs.
Job Scheduler
An HPC system might have thousands of nodes and thousands of users. How do we decide who gets what and when? How do we ensure that a task is run with the resources it needs? This job is handled by a special piece of software called the scheduler. On an HPC system, the scheduler manages which jobs run where and when.
The following illustration compares these tasks of a job scheduler to a waiter in a restaurant. If you can relate to an instance where you had to wait for a while in a queue to get in to a popular restaurant, then you may now understand why sometimes your job do not start instantly as in your laptop.

The scheduler used in this lesson is Slurm. Although Slurm is not used everywhere, running jobs is quite similar regardless of what software is being used. The exact syntax might change, but the concepts remain the same.
Running a Batch Job
The most basic use of the scheduler is to run a command non-interactively. Any command (or series of commands) that you want to run on the cluster is called a job, and the process of using a scheduler to run the job is called batch job submission.
work in the project directory
First, let’s get in the habit of working in the project directory. This makes it easier to ensure our collaborators can see the codes and results we produce.
Substitute your username for
userid
In all our examples, you will see userid in the place of
your own username.
In this case, the job we want to run is a shell script – essentially a text file containing a list of UNIX commands to be executed in a sequential manner. Our shell script will have three parts:
- On the very first line, add
#!/bin/bash. The#!(pronounced “hash-bang” or “shebang”) tells the computer what program is meant to process the contents of this file. In this case, we are telling it that the commands that follow are written for the command-line shell (what we’ve been doing everything in so far). - Anywhere below the first line, we’ll add an
echocommand with a friendly greeting. When run, the shell script will print whatever comes afterechoin the terminal.-
echo -nwill print everything that follows, without ending the line by printing the new-line character.
-
- On the last line, we’ll invoke the
hostnamecommand, which will print the name of the machine the script is run on. - After our script is saved, we must make it executable, or linux
system security will not allow it to run. Use
chmod +xto do this.
BASH
[userid@login01 userid]$ nano example-job.sh
[userid@login01 userid]$ chmod +x example-job.sh
[userid@login01 userid]$ cat example-job.shOUTPUT
#!/bin/bash
echo -n "This script is running on "
hostnameOUTPUT
This script is running on login01This job runs on the login node. !! Remember !! we don’t run jobs on the login node unless they are very small test jobs like this one.
Submit a job to the scheduler
If you completed the previous challenge successfully, you probably
realise that there is a distinction between running the job through the
scheduler and just “running it”. To submit this job to the scheduler, we
use the sbatch with the option
--partition=short.
Partitions
The eagle eyed will have noticed a PARTITION column in the output of
sinfo in the previous episode. HPC systems divide resources
into partitions (or queues), for efficient scheduling.
The ‘short’ partition only allows very short jobs (default 1 minute time
limit), which the scheduler can easily fit in the gaps between longer
jobs. Using ‘short’ is best for small test jobs as they don’t have to
wait in the queue behind bigger jobs.
Partition (queue) Nodes Max concurrent Time limit (wallclock) Default time limit (wallclock) Default memory per core
defq standard 528 cores 2 days 2 days 2.5 GB
bigmem medium,large,XL 2 nodes 2 days(*) 2 days 11 GB
short all 2 nodes 10 minutes 1 minute 2.5 GB
long standard 2 nodes 30 days 5 days 2.5 GB
power(**) power 1 node 2 days 2 days 2.5 GB
interactive all 1 node 1 day or 2 hours idle time 2 hours 2.5 GBOUTPUT
Submitted batch job 36855Our work is done — now the scheduler takes over and tries to run the
job for us. While the job is waiting to run, it goes into a list of jobs
called the queue. To check on our job’s status, we check the
queue using the command squeue -u userid.
Did it work?
If you get an error, check that you have substituted your own
username for userid in the command above
OUTPUT
JOBID PARTITION NAME USER ST TIME NODES NODELIST(REASON)
36855 short example- userid PD 0:00 1 (None)We can see all the details of our job, most importantly that it is in
the R or RUNNING state.
Sometimes our jobs might need to wait in a queue (PD or
PENDING) or become terminated, for example due to
OUT_OF_MEMORY (OOM) error,
TIMEOUT (TO) or some other FAILED
(F) condition.
Other states you may see are: CA (cancelled),
CF(configuring), CG (completing),
CD (completed), NF (node failure),
RV (revoked) and SE (special exit state).
Where’s the Output?
On the login node, this script printed output to the terminal — but
when we exit watch, there’s nothing. Where’d it go? HPC job
output is typically redirected to a file in the directory you launched
it from. Use ls to find and cat to read the
file.
On some HPC systems you may need to redirect the output explictly in
your job submission script. You can achieve this by setting the options
for error --error=<error_filename> and output
--output=<output_filename> filenames. On Rocket this
is handled by default with output and error files named according to the
job submission id.
Customising a Job
The job we just ran used some of the scheduler’s default options. In a real-world scenario, that’s probably not what we want. The default options represent a reasonable minimum. Chances are, we will need more cores, more memory, more time, among other special considerations. To get access to these resources we must customize our job script.
Comments in UNIX shell scripts (denoted by #) are
typically ignored, but there are exceptions. For instance the special
#! comment at the beginning of scripts specifies what
program should be used to run it (you’ll typically see
#!/bin/bash). Schedulers like Slurm also have a special
comment used to denote special scheduler-specific options. Though these
comments differ from scheduler to scheduler, Slurm’s special comment is
#SBATCH. Anything following the #SBATCH
comment is interpreted as an instruction to the scheduler.
Let’s illustrate this by example. By default, a job’s name is the
name of the script, but the --job-name option can be used
to change the name of a job. Add an option to the script:
OUTPUT
#!/bin/bash
#SBATCH --job-name new_name
echo -n "This script is running on "
hostname
echo "This script has finished successfully."Submit the job and monitor its status:
BASH
[userid@login01 userid]$ sbatch --partition=short example-job.sh
[userid@login01 userid]$ squeue -u useridOUTPUT
JOBID USER ACCOUNT NAME ST REASON START_TIME TIME TIME_LEFT NODES CPUS
38191 userid yourAccount new_name PD Priority N/A 0:00 1:00:00 1 1Fantastic, we’ve successfully changed the name of our job!
Resource Requests
But what about more important changes, such as the number of cores and memory for our jobs? One thing that is absolutely critical when working on an HPC system is specifying the resources required to run a job. This allows the scheduler to find the right time and place to schedule our job. If you do not specify requirements (such as the amount of time you need), you will likely be stuck with your site’s default resources, which is probably not what you want.
The following are several key resource requests:
--account=<project> your account is typically your
project code, for example training. Rocket does not charge
users but other HPCs use the --account option for charging
to a project budget.
--partition=<partition> The partition specifies
the set of nodes you want to run on. More information on available
partitions is given in the Rocket
documentation.
Other common options that are used are:
--time=<hh:mm:ss> the maximum walltime for your
job. e.g. For a 6.5 hour walltime, you would use
--time=06:30:00.
--job-name=<jobname> set a name for the job to
help identify it in Slurm command output.
In addition, parallel jobs will also need to specify how many nodes, parallel processes and threads they require.
--exclusive to ensure that you have exclusive access to
a compute node
--nodes=<number> the number of nodes to use for
the job.
--tasks-per-node=<processes per node> the number
of parallel processes (e.g. MPI ranks) per node.
--cpus-per-task=<threads per task> the number of
threads per parallel process (e.g. number of OpenMP threads per MPI task
for hybrid MPI/OpenMP jobs). Note: you must also set the
OMP_NUM_THREADS environment variable if using OpenMP in
your job and usually add the --cpu-bind=cores option to
srun
Note that just requesting these resources does not make your job run faster, nor does it necessarily mean that you will consume all of these resources. It only means that these are made available to you. Your job may end up using less memory, or less time, or fewer tasks or nodes, than you have requested, and it will still run.
It’s best if your requests accurately reflect your job’s requirements. We’ll talk more about how to make sure that you’re using resources effectively in a later episode of this lesson.
Command line options or job script options?
All of the options we specify can be supplied on the command line (as
we do here for --partition=short) or in the job script (as
we have done for the job name above). These are interchangeable. It is
often more convenient to put the options in the job script as it avoids
lots of typing at the command line.
Submitting Resource Requests
Modify our hostname script so that it runs for a minute,
then submit a job for it on the cluster. You should also move all the
options we have been specifying on the command line
(e.g. --partition) into the script at this point.
OUTPUT
#!/bin/bash
#SBATCH --time 00:01:15
#SBATCH --partition=short
echo -n "This script is running on "
sleep 60 # time in seconds
hostname
echo "This script has finished successfully."Why are the Slurm runtime and sleep time not
identical?
Job environment variables
When Slurm runs a job, it sets a number of environment variables for
the job. One of these will let us check what directory our job script
was submitted from. The SLURM_SUBMIT_DIR variable is set to
the directory from which our job was submitted.
Using the SLURM_SUBMIT_DIR variable, modify your job so
that it prints out the location from which the job was submitted.
OUTPUT
#!/bin/bash
#SBATCH --partition=short
#SBATCH --time=00:01 # timeout in HH:MM
echo -n "This script is running on "
hostname
echo "This job was launched in the following directory:"
echo ${SLURM_SUBMIT_DIR}Resource requests are typically binding. If you exceed them, your job will be killed. Let’s use walltime as an example. We will request 30 seconds of walltime, and attempt to run a job for two minutes.
OUTPUT
#!/bin/bash
#SBATCH --job-name long_job
#SBATCH --time 00:00:30
#SBATCH --partition=short
echo "This script is running on ... "
sleep 120 # time in seconds
hostname
echo "This script has finished successfully."Submit the job and wait for it to finish. Once it is has finished, check the log file.
OUTPUT
This script is running on ...
slurmstepd: error: *** JOB 17866475 ON sb013 CANCELLED AT 2025-02-19T07:00:57 DUE TO TIME LIMIT ***Our job was killed for exceeding the amount of resources it requested. Although this appears harsh, this is actually a feature. Strict adherence to resource requests allows the scheduler to find the best possible place for your jobs. Even more importantly, it ensures that another user cannot use more resources than they’ve been given. If another user messes up and accidentally attempts to use all of the cores or memory on a node, Slurm will either restrain their job to the requested resources or kill the job outright. Other jobs on the node will be unaffected. This means that one user cannot mess up the experience of others, the only jobs affected by a mistake in scheduling will be their own.
But how much does it cost?
Rocket does not currently charge you to run jobs but other HPCs do charge. Although your job will be killed if it exceeds the selected runtime, a job that completes within the time limit is only charged for the time it actually used. However, you should always try and specify a wallclock limit that is close to (but greater than!) the expected runtime as this will enable your job to be scheduled more quickly. If you say your job will run for an hour, the scheduler has to wait until a full hour becomes free on the machine. If it only ever runs for 5 minutes, you could have set a limit of 10 minutes and it might have been run earlier in the gaps between other users’ jobs.
Cancelling a Job
Sometimes we’ll make a mistake and need to cancel a job. This can be
done with the scancel command. Let’s submit a job and then
cancel it using its job number (remember to change the walltime so that
it runs long enough for you to cancel it before it is killed!).
OUTPUT
Submitted batch job 38759
JOBID PARTITION NAME USER ST TIME NODES NODELIST(REASON)
38759 short long_job ncb176 R 1:13 1 sb013Now cancel the job with its job number (printed in your terminal). Absence of any job info indicates that the job has been successfully cancelled.
BASH
[userid@login01 userid]$ scancel 38759
# It might take a minute for the job to disappear from the queue...
[userid@login01 userid]$ squeue -u useridOUTPUT
JOBID PARTITION NAME USER ST TIME NODES NODELIST(REASON)Cancelling multiple jobs
We can also cancel all of our jobs at once using the -u
option. This will delete all jobs for a specific user (in this case us).
Note that you can only delete your own jobs. Try submitting multiple
jobs and then cancelling them all with
scancel -u userid.
Other Types of Jobs
Up to this point, we’ve focused on running jobs in batch mode. Slurm also provides the ability to start an interactive session.
There are very frequently tasks that need to be done interactively.
Creating an entire job script might be overkill, but the amount of
resources required is too much for a login node to handle. A good
example of this might be building a genome index for alignment with a
tool like HISAT2.
Fortunately, we can run these types of tasks as a one-off with
srun.
srun runs a single command in the queue system and then
exits. Let’s demonstrate this by running the hostname
command with srun. (We can cancel an srun job
with Ctrl-c.)
OUTPUT
srun: job 17866477 queued and waiting for resources
srun: job 17866477 has been allocated resources
sb013.clustersrun accepts all of the same options as
sbatch. However, instead of specifying these in a script,
these options are specified on the command-line when starting a job.
Typically, the resulting shell environment will be the same as that
for sbatch.
Interactive jobs
Sometimes, you will need a lot of resource for interactive use.
Perhaps it’s our first time running an analysis or we are attempting to
debug something that went wrong with a previous job. Fortunately, SLURM
makes it easy to start an interactive job with srun:
You should be presented with a bash prompt. Note that the prompt may
change to reflect your new location, in this case the compute node we
are logged on. You can also verify this with hostname.
When you are done with the interactive job, type exit to
quit your session.
- “The scheduler handles how compute resources are shared between users.”
- “Everything you do should be run through the scheduler.”
- “A job is just a shell script.”
- “If in doubt, request more resources than you will need.”
Content from Accessing software via Modules
Last updated on 2025-03-05 | Edit this page
Overview
Questions
- How do we load and unload software packages?
Objectives
- Understand how to load and use a software package.
On a high-performance computing system, it is seldom the case that the software we want to use is available when we log in. It is installed, but we will need to “load” it before it can run.
Before we start using individual software packages, however, we should understand the reasoning behind this approach. The three biggest factors are:
- software incompatibilities
- versioning
- dependencies
Software incompatibility is a major headache for programmers.
Sometimes the presence (or absence) of a software package will break
others that depend on it. Two of the most famous examples are Python 2
and 3 and C compiler versions. Python 3 famously provides a
python command that conflicts with that provided by Python
2. Software compiled against a newer version of the C libraries and then
used when they are not present will result in a nasty
'GLIBCXX_3.4.20' not found error, for instance.
Software versioning is another common issue. A team might depend on a certain package version for their research project - if the software version was to change (for instance, if a package was updated), it might affect their results. Having access to multiple software versions allow a set of researchers to prevent software versioning issues from affecting their results.
Dependencies are where a particular software package (or even a particular version) depends on having access to another software package (or even a particular version of another software package). For example, the VASP materials science software may depend on having a particular version of the FFTW (Fastest Fourier Transform in the West) software library available for it to work.
Environment Modules
Environment modules are the solution to these problems. A module is a self-contained description of a software package — it contains the settings required to run a software package and, usually, encodes required dependencies on other software packages.
There are a number of different environment module implementations
commonly used on HPC systems: the two most common are TCL
modules and Lmod. Both of these use similar syntax and the
concepts are the same so learning to use one will allow you to use
whichever is installed on the system you are using. In both
implementations the module command is used to interact with
environment modules. An additional subcommand is usually added to the
command to specify what you want to do. For a list of subcommands you
can use module -h or module help. As for all
commands, you can access the full help on the man pages with
man module.
On login you may start out with a default set of modules loaded or you may start out with an empty environment; this depends on the setup of the system you are using.
Listing Available Modules
To see available software modules, use module avail:
OUTPUT
------------------------------------------- /mnt/storage/apps/at11.0/share/modules --------------------------------------------
modulefiles/at11.0-powerpc64le-linux-gnu
---------------------------------------------- /mnt/storage/apps/eb/modules/all -----------------------------------------------
ABINIT/8.2.2-intel-2017.03-GCC-6.3
ABINIT/8.4.4-foss-2017b
ABINIT/8.4.4-intel-2017.03-GCC-6.3
ABINIT/8.10.1-intel-2018b
ABINIT/9.4.2-foss-2021b (D)
ABRicate/1.0.0-gompi-2021a
AFNI/20160329-intel-2017.03-GCC-6.3-Python-2.7.12
ALE/1.0.0-foss-2021a
ANSYS/17.0
ANSYS/18.1
ANSYS/19.4
ANSYS/2020-R2
ANSYS/2021
ANSYS/2022-R1
ANSYS/2024R1 (D)
ANTLR/2.7.7-GCCcore-11.2.0-Java-11.0.2
ANTLR/2.7.7-GCCcore-11.3.0-Java-11.0.2 (D)
ANTs/2.3.1-foss-2018b-Python-3.6.6
ANTs/2.3.2-foss-2019b-Python-3.7.4
ANTs/2.3.5-foss-2021a (D)
Loading and Unloading Software
To load a software module, use module load. In this
example we will use Python 3.
Initially, Python 3 is not loaded. We can test this by using the which command. which looks for programs the same way that Bash does, so we can use it to tell us where a particular piece of software is stored.
If the python3 command was unavailable, we would see
output like
OUTPUT
/usr/bin/which: no python3 in (/usr/local/bin:/usr/bin:/usr/local/sbin:/usr/sbin:/mnt/nfs/home/userid/bin/:/opt/ibutils/bin:/mnt/nfs/home/userid/bin/:/mnt/nfs/home/userid/.local/bin:/mnt/nfs/home/userid/bin)Note that this wall of text is really a list, with values separated by the : character. The output is telling us that the which command searched the following directories for python3, without success:
BASH
usr/local/bin
/usr/bin
/usr/local/sbin
/usr/sbin
/mnt/nfs/home/userid/bin/
/opt/ibutils/bin
/mnt/nfs/home/userid/bin/
/mnt/nfs/home/userid/.local/bin
/mnt/nfs/home/userid/binWe can load the python3 command with
module load:
OUTPUT
/mnt/storage/apps/eb/software/Python/3.7.0-foss-2018b/bin/python3So, what just happened?
To understand the output, first we need to understand the nature of
the $PATH environment variable. $PATH is a
special environment variable that controls where a UNIX system looks for
software. Specifically $PATH is a list of directories
(separated by :) that the OS searches through for a command
before giving up and telling us it can’t find it. As with all
environment variables we can print it out using echo.
OUTPUT
/mnt/storage/apps/eb/software/Python/3.7.0-foss-2018b/bin:/mnt/storage/apps/eb/software/OpenSSL/1.1.0h-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/SQLite/3.24.0-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/Tcl/8.6.8-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/libreadline/7.0-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/ncurses/6.1-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/bzip2/1.0.6-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/FFTW/3.3.8-gompi-2018b/bin:/mnt/storage/apps/eb/software/OpenMPI/3.1.1-GCC-7.3.0-2.30/bin:/mnt/storage/apps/eb/software/hwloc/1.11.10-GCCcore-7.3.0/sbin:/mnt/storage/apps/eb/software/hwloc/1.11.10-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/libxml2/2.9.8-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/XZ/5.2.4-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/numactl/2.0.11-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/binutils/2.30-GCCcore-7.3.0/bin:/mnt/storage/apps/eb/software/GCCcore/7.3.0/bin:/usr/local/bin:/usr/bin:/usr/local/sbin:/usr/sbin:/mnt/nfs/home/userid/bin:/opt/ibutils/bin:/mnt/nfs/home/userid/.local/binYou’ll notice a similarity to the output of the which
command. In this case, there’s only one difference: the different
directory at the beginning. When we ran the module load
command, it added a directory to the beginning of our
$PATH. Let’s examine what’s there:
OUTPUT
2to3 cython f2py nosetests pip3 python python3.7m pyvenv-3.7
2to3-3.7 cythonize idle3 nosetests-3.7 pip3.7 python3 python3.7m-config runxlrd.py
chardetect easy_install idle3.7 pbr pydoc3 python3.7 python3-config tabulate
cygdb easy_install-3.7 netaddr pip pydoc3.7 python3.7-config pyvenv virtualenvTaking this to its conclusion, module load will add
software to your $PATH. It “loads” software. A special note
on this - depending on which version of the module program
that is installed at your site, module load will also load
required software dependencies.
To demonstrate, let’s use module list.
module list shows all loaded software modules.
OUTPUT
Currently Loaded Modules:
1) GCCcore/7.3.0 9) hwloc/1.11.10-GCCcore-7.3.0 17) ncurses/6.1-GCCcore-7.3.0
2) zlib/1.2.11-GCCcore-7.3.0 10) OpenMPI/3.1.1-GCC-7.3.0-2.30 18) libreadline/7.0-GCCcore-7.3.0
3) binutils/2.30-GCCcore-7.3.0 11) OpenBLAS/0.3.1-GCC-7.3.0-2.30 19) Tcl/8.6.8-GCCcore-7.3.0
4) GCC/7.3.0-2.30 12) gompi/2018b 20) SQLite/3.24.0-GCCcore-7.3.0
5) numactl/2.0.11-GCCcore-7.3.0 13) FFTW/3.3.8-gompi-2018b 21) GMP/6.1.2-GCCcore-7.3.0
6) XZ/5.2.4-GCCcore-7.3.0 14) ScaLAPACK/2.0.2-gompi-2018b-OpenBLAS-0.3.1 22) libffi/3.2.1-GCCcore-7.3.0
7) libxml2/2.9.8-GCCcore-7.3.0 15) foss/2018b 23) OpenSSL/1.1.0h-GCCcore-7.3.0
8) libpciaccess/0.14-GCCcore-7.3.0 16) bzip2/1.0.6-GCCcore-7.3.0 24) Python/3.7.0-foss-2018bLet’s try unloading the Python module:
OUTPUT
[userid@login01 ~]$ module list
Currently Loaded Modules:
1) GCCcore/7.3.0 9) hwloc/1.11.10-GCCcore-7.3.0 17) ncurses/6.1-GCCcore-7.3.0
2) zlib/1.2.11-GCCcore-7.3.0 10) OpenMPI/3.1.1-GCC-7.3.0-2.30 18) libreadline/7.0-GCCcore-7.3.0
3) binutils/2.30-GCCcore-7.3.0 11) OpenBLAS/0.3.1-GCC-7.3.0-2.30 19) Tcl/8.6.8-GCCcore-7.3.0
4) GCC/7.3.0-2.30 12) gompi/2018b 20) SQLite/3.24.0-GCCcore-7.3.0
5) numactl/2.0.11-GCCcore-7.3.0 13) FFTW/3.3.8-gompi-2018b 21) GMP/6.1.2-GCCcore-7.3.0
6) XZ/5.2.4-GCCcore-7.3.0 14) ScaLAPACK/2.0.2-gompi-2018b-OpenBLAS-0.3.1 22) libffi/3.2.1-GCCcore-7.3.0
7) libxml2/2.9.8-GCCcore-7.3.0 15) foss/2018b 23) OpenSSL/1.1.0h-GCCcore-7.3.0
8) libpciaccess/0.14-GCCcore-7.3.0 16) bzip2/1.0.6-GCCcore-7.3.0So using module unload “un-loads” a module, and
depending on how a site is configured it may also unload all of the
dependencies (in our case it does not). If we wanted to unload
everything at once, we could run module purge (unloads
everything).
OUTPUT
No modules loadedMore on modules
Note that module purge is informative. It will also let
us know if a default set of “sticky” packages cannot be unloaded (and
how to actually unload these if we truly so desired).
Note that this module loading process happens principally through the
manipulation of environment variables like $PATH. There is
usually little or no data transfer involved.
The module loading process manipulates other special environment variables as well, including variables that influence where the system looks for software libraries, and sometimes variables which tell commercial software packages where to find license servers.
The module command also restores these shell environment variables to their previous state when a module is unloaded.
Software versioning
So far, we’ve learned how to load and unload software packages. This is very useful. However, we have not yet addressed the issue of software versioning. At some point or other, you will run into issues where only one particular version of some software will be suitable. Perhaps a key bugfix only happened in a certain version, or version X broke compatibility with a file format you use. In either of these example cases, it helps to be very specific about what software is loaded.
Let’s look specifically for Python in module avail:
Because so many modules match Python we’ve cheated a little
and added /3 focus down on Python 3 modules
OUTPUT
----------------------- /mnt/storage/apps/eb/modules/all -----------------------
GitPython/3.1.24-GCCcore-11.2.0
Python/3.6.1-goolf-2017a
Python/3.6.1-intel-2017.03-GCC-6.3
Python/3.6.3-foss-2017b
Python/3.6.6-foss-2018b
Python/3.6.6-intel-2018b
Python/3.7.0-foss-2018b (D)
Python/3.7.0-intel-2018b
Python/3.7.2-GCCcore-8.2.0
Python/3.7.4-GCCcore-8.3.0
Python/3.7.5-GCCcore-8.3.0
Python/3.8.2-GCCcore-9.3.0
Python/3.8.6-GCCcore-10.2.0
Python/3.9.5-GCCcore-10.3.0-bare
Python/3.9.5-GCCcore-10.3.0
Python/3.9.6-GCCcore-11.2.0-bare
Python/3.9.6-GCCcore-11.2.0
Python/3.10.4-GCCcore-11.3.0-bare
Python/3.10.4-GCCcore-11.3.0
Python/3.10.8-GCCcore-12.2.0-bare
Python/3.10.8-GCCcore-12.2.0
Python/3.11.3-GCCcore-12.3.0
protobuf-python/3.3.0-intel-2017.03-GCC-6.3-Python-2.7.13
protobuf-python/3.3.0-intel-2017.03-GCC-6.3-Python-3.6.1
protobuf-python/3.13.0-foss-2020a-Python-3.8.2
protobuf-python/3.14.0-GCCcore-10.2.0
protobuf-python/3.17.3-GCCcore-10.3.0 (D)
Where:
D: Default Module
Use "module spider" to find all possible modules and extensions.
Use "module keyword key1 key2 ..." to search for all possible modules matching
any of the "keys".Note that we have several different versions of Python3.
In this case, Python/3.7.0-foss-2018b has a
(D) next to it. This indicates that it is the default - if
we type module load Python, this is the copy that will be
loaded.
Using Software Modules in Scripts
Create a job to report what version of python is running, uisng the
command python3 --version. Running a job is just like
logging on to the system (you should not assume a module loaded on the
login node is loaded on a compute node).
Default Versions and Module Swap
Let’s take a closer look at the gcc module. GCC is an
extremely widely used C/C++/Fortran compiler. Lots of software is
dependent on the GCC version, and might not compile or run if the wrong
version is loaded. In this case, there are 18 different versions, named
like GCC/12.2.0. How do we load each copy and which copy is
the default?
OUTPUT
---------------------------------------------------------------------------- /mnt/storage/apps/eb/modules/all -----------------------------------------------------------------------------
GCC/4.8.2 GCC/4.9.3-2.25 GCC/5.4.0-2.26 GCC/6.3.0-2.27 GCC/7.3.0-2.30 GCC/8.3.0 GCC/10.2.0 GCC/11.2.0 GCC/12.2.0
GCC/4.9.3-binutils-2.25 GCC/5.2.0 GCC/6.1.0-2.27 GCC/6.4.0-2.28 GCC/8.2.0-2.31.1 GCC/9.3.0 GCC/10.3.0 GCC/11.3.0 GCC/12.3.0 (D)
Where:
D: Default Module
Use "module spider" to find all possible modules and extensions.
Use "module keyword key1 key2 ..." to search for all possible modules matching any of the "keys".In this case, GCC/12.3.0 has a (D) next to
it. This indicates that it is the default - if we type
module load GCC, this is the copy that will be loaded.
Let’s check this:
BASH
[userid@login01 ~]$ module purge
[userid@login01 ~]$ module load GCC
[userid@login01 ~]$ module listOUTPUT
Currently Loaded Modules:
1) GCCcore/12.3.0 2) zlib/1.2.13-GCCcore-12.3.0 3) binutils/2.40-GCCcore-12.3.0 4) GCC/12.3.0OUTPUT
gcc (GCC) 12.3.0
Copyright (C) 2022 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.So how do we load the non-default copy of a software package? In this case, the only change we need to make is be more specific about the module we are loading. To load a non-default module, we need to make add the version number after the / in our module load command:
OUTPUT
The following have been reloaded with a version change:
1) GCC/12.3.0 => GCC/11.2.0 3) binutils/2.40-GCCcore-12.3.0 => binutils/2.37-GCCcore-11.2.0
2) GCCcore/12.3.0 => GCCcore/11.2.0 4) zlib/1.2.13-GCCcore-12.3.0 => zlib/1.2.11-GCCcore-11.2.0What happened? The module command is teling us that it swapped out
GCC/12.3.0 and replaced it with GCC/11.2.0
OUTPUT
gcc (GCC) 11.2.0
Copyright (C) 2021 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.can’t load a new module version?
Sometimes the module command gives a warning requiring you to unload
the current version of a module before loading the new version. As
switching between different versions of the same module is often used
you can use module swap rather than unloading one version
before loading another. The equivalent of the steps above would be:
BASH
[userid@login01 ~]$ module purge
[userid@login01 ~]$ module load GCC
[userid@login01 ~]$ module swap GCC GCC/11.2.0OUTPUT
The following have been reloaded with a version change:
1) GCC/12.3.0 => GCC/11.2.0 3) binutils/2.40-GCCcore-12.3.0 => binutils/2.37-GCCcore-11.2.0
2) GCCcore/12.3.0 => GCCcore/11.2.0 4) zlib/1.2.13-GCCcore-12.3.0 => zlib/1.2.11-GCCcore-11.2.0And what happens when we load python again?
OUTPUT
The following have been reloaded with a version change:
1) GCC/11.2.0 => GCC/7.3.0-2.30 3) binutils/2.37-GCCcore-11.2.0 => binutils/2.30-GCCcore-7.3.0
2) GCCcore/11.2.0 => GCCcore/7.3.0 4) zlib/1.2.11-GCCcore-11.2.0 => zlib/1.2.11-GCCcore-7.3.0Because the version of python isn’t compatible with the currently loaded version of gcc, module has done a swap for us.
system python
Watch out for system provided python, it may not be the version you
need. It’s best to always specify your python version. On Rocket, the
default version of Python is Python2. To confirm the version type
python --version which, on Rocket, will return
Python 2.7.5.
- “Load software with
module load softwareName.” - “Unload software with
module unloadormodule purge” - “The module system handles software versioning and package conflicts for you automatically.”
Content from Transferring files with remote computers
Last updated on 2025-03-11 | Edit this page
Overview
Questions
- How do I transfer files to (and from) the cluster?
Objectives
-
wgetandcurl -Odownload a file from the internet. -
scptransfers files to and from your computer. -
rsynctransfers within the filesystem as well as to and from your computer
Required Files
The files used in this example can be retrieved using wget or a browser on your laptop and then copied to the remote cluster.
Using wget:
BASH
[userid@login01 ~]$ wget http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gzUsing a web browser:
http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gz
A remote cluster offers very limited use if we cannot get files to or from it. There are several options for transferring data between computing resources, from command line options to GUI programs, which we will cover here.
Download Files From the Internet
One of the most straightforward ways to download files is to use
either curl or wget, one of these is usually
installed in most Linux shells, on Mac OS terminal and in GitBash. Any
file that can be downloaded in your web browser through a direct link
can be downloaded using curl -O or wget. This
is a quick way to download datasets or source code.
The syntax for these commands is:
curl -O https://some/link/to/a/file and
wget https://some/link/to/a/file. Try it out by downloading
some material we’ll use later on, from a terminal on your local
machine.
BASH
[user@laptop ~]$ curl -O http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gzor
BASH
[user@laptop ~]$ wget http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gz
tar.gz?
This is an archive file format, just like .zip, commonly
used and supported by default on Linux, which is the operating system
the majority of HPC cluster machines run. You may also see the extension
.tgz, which is exactly the same. We’ll talk more about
“tarballs,” since “tar-dot-g-z” is a mouthful, later on.
Transferring Single Files and Folders With scp
To copy a single file to or from the cluster, we can use
scp (“secure copy”). The syntax can be a little complex for
new users, but we’ll break it down.
To upload to a remote computer:
To download from a remote computer:
Note that everything after the : is optional. If you
don’t specify a path on the remote computer, the file will be
transferred to your home directory. It’s a good idea to be clear about
where you are putting the file though, so use ~/ to upload
to the top level in your home directory. (using the handy ~
as shorthand for your home directory.)
Upload a File
Copy the file you just downloaded from the Internet to your home directory on Rocket.
Can you download to the cluster directly?
Try downloading the file directly using curl or
wget. Do the commands understand file locations on your
local machine over SSH? Note that it may well fail, and that’s OK!
Using curl or wget commands like the
following:
BASH
[user@laptop ~]$ ssh userid@rocket.hpc
[userid@login01 ~]$ curl -O http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gz
or
[userid@login01 ~]$ wget http://training.researchcomputing.ncl.ac.uk/training-materials/hpc-intro-data.tar.gzDid it work? If not, what does the terminal output tell you about what happened?
Why Not Download Directly to the cluster?
Some computer clusters are behind firewalls set to only allow
transfers initiated from the outside. This means that the
curl command will fail, as an address outside the firewall
is unreachable from the inside. To get around this, run the
curl or wget command from your local machine
to download the file, then use the scp command (just below
here) to upload it to the cluster.
Transferring a Directory
To copy a whole directory, we add the -r flag, for
“recursive”: copy the item specified, and every item
below it, and every item below those… until it reaches the bottom of the
directory tree rooted at the folder name you provided.
Caution
For a large directory — either in size or number of files — copying
with -r can take a long time to complete.
What’s in a /?
When using scp, you may have noticed that a
: always follows the remote computer name;
sometimes a / follows that, and sometimes not, and
sometimes there’s a final /. On Linux computers,
/ is the root directory, the
location where the entire filesystem (and others attached to it) is
anchored. A path starting with a / is called
absolute, since there can be nothing above the root
/. A path that does not start with / is called
relative, since it is not anchored to the root.
If you want to upload a file to a location inside your home directory
— which is often the case — then you don’t need a leading
/. After the :, start writing the sequence of
folders that lead to the final storage location for the file or, as
mentioned above, provide nothing if your home directory is the
destination.
A trailing slash on the target directory is optional, and has no
effect for scp -r, but is important in other commands, like
rsync.
Windows Users - Transferring Files interactively with MobaXterm
MobaXterm is a free ssh client. It allows connections via a ‘jump host’ so can even be used from home.
Transferring files to and from Campus Storage for Research Data (RDW)
RDW is mounted on Rocket at /rdw. You can use scp and
rsync to transfer data to RDW in the same way as copying to any other
directory on Rocket.
Using cp to copy to RDW
Because /rdw is a mounted filesystem, we can use
cp instead of scp:
BASH
[userid@login01 ~]$ cp file.txt /rdw/03/rse-hpc/training/userid/
[userid@login01 rse-hpc]$ cd /rdw/03/rse-hpc/training/userid/
[userid@login01 userid]$ pwdOUTPUT
/rdw/03/rse-hpc/training/useridOUTPUT
file.txtUsing rsync to copy to RDW
As you gain experience with transferring files, you may find the
scp command limiting. The rsync utility provides advanced
features for file transfer and is typically faster compared to both
scp and sftp (see below). It is especially
useful for transferring large and/or many files and creating synced
backup folders. The syntax is similar to cp and
scp. Rsync can be used on a locally mounted filesystem or a
remote filesystem.
Transfer to RDW from your work area on Rocket
Try out a dry run:
BASH
[userid@login01 ~]$ cd /nobackup/proj/training/userid/
[userid@sb024 userid]$ mkdir TestDir
[userid@sb024 userid]$ touch TestDir/testfile1
[userid@sb024 userid]$ touch TestDir/testfile2
[userid@login01 userid]$ rsync -av TestDir /rdw/03/rse-hpc/training/userid --dry-runOUTPUT
sending incremental file list
TestDir/
TestDir/testfile1
TestDir/testfile2
sent 121 bytes received 26 bytes 294.00 bytes/sec
total size is 0 speedup is 0.00 (DRY RUN)Run ‘for real’:
OUTPUT
sending incremental file list
created directory /rdw/03/rse-hpc/training/userid
rsync: chgrp "/rdw/03/rse-hpc/training/userid/TestDir" failed: Invalid argument (22)
TestDir/
TestDir/testfile1
TestDir/testfile2
rsync: chgrp "/rdw/03/rse-hpc/training/userid/TestDir/.testfile1.ofeRqX" failed: Invalid argument (22)
rsync: chgrp "/rdw/03/rse-hpc/training/userid/TestDir/.testfile2.fS1m6j" failed: Invalid argument (22)
sent 197 bytes received 415 bytes 408.00 bytes/sec
total size is 0 speedup is 0.00
rsync error: some files/attrs were not transferred (see previous errors) (code 23) at main.c(1179) [sender=3.1.2]What happened? rsync returned an error.
files/attrs were not transferred This is because RDW
doesn’t ‘know’ about Rocket’s groups. The transfer was successful
though! Only the ‘group’ attribute of the file couldn’t be transferred.
RDW has ‘trumped’ our local permissions and imposed its own standard
permissions. This isn’t important, the correct user keeps ownership of
the files.
OUTPUT
total 0
-rw------- 1 userid rockhpc_training 0 Mar 11 20:06 testfile1
-rw------- 1 userid rockhpc_training 0 Mar 11 20:06 testfile2
OUTPUT
total 33
-rwxrwx--- 1 userid domainusers 0 Mar 11 20:10 testfile1
-rwxrwx--- 1 userid domainusers 0 Mar 11 20:10 testfile2It’s still easier to read output without errors that we have to ignore, so let’s remove that error.
The -a (archive) option preserves permissions, this is
why we see group modification errors above.
For Rocket and RDW, replace -av with
-rltv-r = recurse through subdirectories-l = copy symlinks-t = preserve timestamps-v = verbose
OUTPUT
sending incremental file list
./
testfile1
testfile2
sent 150 bytes received 57 bytes 414.00 bytes/sec
total size is 0 speedup is 0.00Spot the difference
Can you spot the difference betweent the 2 previous rsync commands?
Try ls -l on the destination.
OUTPUT
/rdw/03/rse-hpc/training/userid/:
TestDir testfile1 testfile2
/rdw/03/rse-hpc/training/userid/TestDir:
testfile1 testfile2
We now have too many files! The first rsync command copied
TestDir because there was no trailing /.
The second rsync command only copied the contents of
TestDir because of the trailing /.
We could have spotted this by looking at the output of
--dry-run but this shows it’s a good idea to check the
destination after you copy.
Large data copies
When copying large amounts of data, rsync really comes into its own. When you’re copying a lot of data, it’s important to keep track in case the copy is interrupted. Rsync is great because it can pick up where it left off, rather than starting the copy all over again. It’s also useful to output to a log so you can see what was transferred and find any errors that need to be addressed.
Fast Connections
Transfers from Rocket to RDW don’t leave our fast data centre network. If you’re using rsync with a fast network or disk to disk in the same machine:
- DON’T use compression
-z - DO use
--inplace
Why? compression uses lots of CPU, Rsync usually creates a temp file
on disk before copying. For fast transfers, this places too much load on
the CPU and hard drive.--inplace tells rsync not to create the temp file but send
the data straight away. It doesn’t matter if the connection is
interrupted, because rsync keeps track and tries again. Always re-run
transfer command to ensure nothing was missed. The second run should be
very fast, just listing all the files and not copying anything.
Slow Connections
For a slow connection like the internet:
- DO use compression
-z - DON’T use
--inplace.
Large Transfer to RDW
RDW has a super-fast connection to Rocket, which means that it takes more resource to compress and un-compress the data than it does to do the transfer. What command would best for backing up a large amount of data from Rocket to RDW?
add a dry run and a log file
Try out a dry run:
BASH
rsync --dry-run -rltv --inplace --itemize-changes --progress --stats --whole-file --size-only /nobackup/myusername/source /rdw/path/to/my/share/destination/ 2>&1 | tee /home/myusername/meaningful-log-name.log1Run ‘for real’:
BASH
rsync -rltv --inplace --itemize-changes --progress --stats --whole-file --size-only /nobackup/myusername/source /rdw/path/to/my/share/destination/ 2>&1 | tee /home/myusername/meaningful-log-name.log2-
--inplace --whole-file --size-onlyspeed up transfer and prevent rsync filling up space with a large temporary directory
-
--itemize-changes --progress --statsfor more informative output
- Remember
|from the Unix Shell workshop?| teesends output both to the screen and to a log file
- All the arguments can be single letters like
-vor full words like--verbose. Useman rsyncto craft your favourite arguments list.
A Note on Ports
All file transfers using the above methods use SSH to encrypt data
sent through the network. So, if you can connect via SSH, you will be
able to transfer files. By default, SSH uses network port 22. If a
custom SSH port is in use, you will have to specify it using the
appropriate flag, often -p, -P, or
--port. Check --help or the man
page if you’re unsure.
Archiving Files
One of the biggest challenges we often face when transferring data between remote HPC systems is that of large numbers of files. There is an overhead to transferring each individual file and when we are transferring large numbers of files these overheads combine to slow down our transfers to a large degree.
The solution to this problem is to archive multiple files into smaller numbers of larger files before we transfer the data to improve our transfer efficiency. Sometimes we will combine archiving with compression to reduce the amount of data we have to transfer and so speed up the transfer.
The most common archiving command you will use on a (Linux) HPC
cluster is tar. tar can be used to combine
files into a single archive file and, optionally, compress it.
Let’s start with the file we downloaded from the lesson site,
hpc-lesson-data.tar.gz. The “gz” part stands for
gzip, which is a compression library. Reading this file name,
it appears somebody took a folder named “hpc-lesson-data,” wrapped up
all its contents in a single file with tar, then compressed
that archive with gzip to save space. Let’s check using
tar with the -t flag, which prints the
“table of contents” without unpacking the file,
specified by -f <filename>, on the remote computer.
Note that you can concatenate the two flags, instead of writing
-t -f separately.
BASH
[user@laptop ~]$ ssh userid@rocket.hpc
[userid@login01 ~]$ tar -tf hpc-lesson-data.tar.gz
hpc-intro-data/
hpc-intro-data/north-pacific-gyre/
hpc-intro-data/north-pacific-gyre/NENE01971Z.txt
hpc-intro-data/north-pacific-gyre/goostats
hpc-intro-data/north-pacific-gyre/goodiff
hpc-intro-data/north-pacific-gyre/NENE02040B.txt
hpc-intro-data/north-pacific-gyre/NENE01978B.txt
hpc-intro-data/north-pacific-gyre/NENE02043B.txt
hpc-intro-data/north-pacific-gyre/NENE02018B.txt
hpc-intro-data/north-pacific-gyre/NENE01843A.txt
hpc-intro-data/north-pacific-gyre/NENE01978A.txt
hpc-intro-data/north-pacific-gyre/NENE01751B.txt
hpc-intro-data/north-pacific-gyre/NENE01736A.txt
hpc-intro-data/north-pacific-gyre/NENE01812A.txt
hpc-intro-data/north-pacific-gyre/NENE02043A.txt
hpc-intro-data/north-pacific-gyre/NENE01729B.txt
hpc-intro-data/north-pacific-gyre/NENE02040A.txt
hpc-intro-data/north-pacific-gyre/NENE01843B.txt
hpc-intro-data/north-pacific-gyre/NENE01751A.txt
hpc-intro-data/north-pacific-gyre/NENE01729A.txt
hpc-intro-data/north-pacific-gyre/NENE02040Z.txtThis shows a folder containing another folder, which contains a bunch
of files. If you’ve taken The Carpentries’ Shell lesson recently, these
might look familiar. Let’s see about that compression, using
du for “disk usage”.
Files Occupy at Least One “Block”
If the filesystem block size is larger than 36 KB, you’ll see a larger number: files cannot be smaller than one block.
Now let’s unpack the archive. We’ll run tar with a few
common flags:
-
-xto extract the archive -
-vfor verbose output -
-zfor gzip compression -
-ffor the file to be unpacked
When it’s done, check the directory size with du and
compare.
Extract the Archive
Using the four flags above, unpack the lesson data using
tar. Then, check the size of the whole unpacked directory
using du. Hint: tar lets you concatenate
flags.
OUTPUT
hpc-intro-data/
hpc-intro-data/north-pacific-gyre/
hpc-intro-data/north-pacific-gyre/NENE01971Z.txt
hpc-intro-data/north-pacific-gyre/goostats
hpc-intro-data/north-pacific-gyre/goodiff
hpc-intro-data/north-pacific-gyre/NENE02040B.txt
hpc-intro-data/north-pacific-gyre/NENE01978B.txt
hpc-intro-data/north-pacific-gyre/NENE02043B.txt
hpc-intro-data/north-pacific-gyre/NENE02018B.txt
hpc-intro-data/north-pacific-gyre/NENE01843A.txt
hpc-intro-data/north-pacific-gyre/NENE01978A.txt
hpc-intro-data/north-pacific-gyre/NENE01751B.txt
hpc-intro-data/north-pacific-gyre/NENE01736A.txt
hpc-intro-data/north-pacific-gyre/NENE01812A.txt
hpc-intro-data/north-pacific-gyre/NENE02043A.txt
hpc-intro-data/north-pacific-gyre/NENE01729B.txt
hpc-intro-data/north-pacific-gyre/NENE02040A.txt
hpc-intro-data/north-pacific-gyre/NENE01843B.txt
hpc-intro-data/north-pacific-gyre/NENE01751A.txt
hpc-intro-data/north-pacific-gyre/NENE01729A.txt
hpc-intro-data/north-pacific-gyre/NENE02040Z.txtNote that we did not type out -x -v -z -f, thanks to the
flag concatenation, though the command works identically either way.
Was the Data Compressed?
Text files compress nicely: the “tarball” is one-quarter the total size of the raw data!
If you want to reverse the process — compressing raw data instead of
extracting it — set a c flag instead of x, set
the archive filename, then provide a directory to compress:
Working with Windows
When you transfer text files to from a Windows system to a Unix
system (Mac, Linux, BSD, Solaris, etc.) this can cause problems. Windows
encodes its files slightly different than Unix, and adds an extra
character to every line. On a Unix system, every line in a file ends
with a \n (newline). On Windows, every line in a file ends
with a \r\n (carriage return + newline). This causes
problems sometimes. Though most modern programming languages and
software handles this correctly, in some rare instances, you may run
into an issue. The solution is to convert a file from Windows to Unix
encoding with the dos2unix command. You can identify if a
file has Windows line endings with cat -A filename. A file
with Windows line endings will have ^M$ at the end of every
line. A file with Unix line endings will have $ at the end
of a line. To convert the file, just run dos2unix filename.
(Conversely, to convert back to Windows format, you can run
unix2dos filename.)
-
wgetandcurl -Odownload a file from the internet. -
scptransfers files to and from your computer. -
rsyncis good for large transfers because it only transfers changed files
Content from Running a parallel job
Last updated on 2025-03-06 | Edit this page
Overview
Questions
- “How do we execute a task in parallel?”
- “What benefits arise from parallel execution?”
- “What are the limits of gains from execution in parallel?”
Objectives
- “Construct a program that can execute in parallel.”
- “Prepare a job submission script for the parallel executable.”
- “Launch jobs with parallel execution.”
- “Record and summarize the timing and accuracy of jobs.”
- “Describe the relationship between job parallelism and performance.”
We now have the tools we need to run a multi-processor job. This is a very important aspect of HPC systems, as parallelism is one of the primary tools we have to improve the performance of computational tasks.
Our example implements a method for estimating the value of π, the
ratio of the circumference to the diameter of a circle.
The program generates a large number of random points on a 1×1 square
centered on (½,½), and checks how many of these points fall inside the
unit circle. On average, π/4 of the randomly-selected points should fall
in the circle, so π can be estimated from 4f, where f
is the observed fraction of points that fall in the circle. Because each
sample is independent, this algorithm is easily implemented in
parallel.
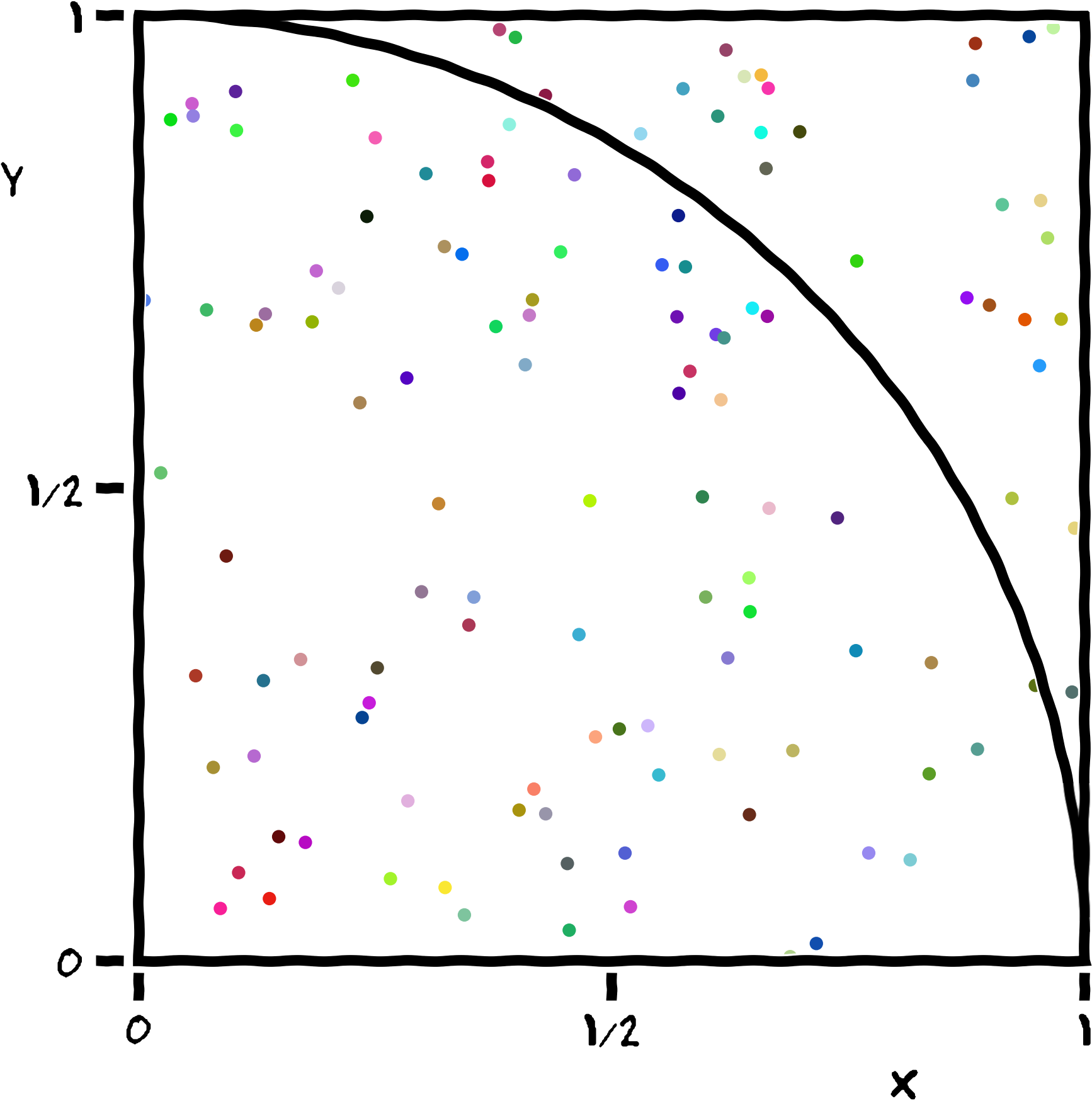
Get code for this episode
The Python code you will use in this episode has been pre-written and
you can obtain a copy by: Method 1: Use the commands curl
or wget from the previous episode to download the files
directly into your working directory on Rocket and extract the archive.
Remember you will need to specify the path to these Python files in your
job submission scripts. It may be useful to cd into this
directory or mv the contents directly to the path
/nobackup/proj/training/userid.
BASH
[userid@rocket.hpc ~]$ curl -O https://nclrse-training.github.io/hpc-intro-cirrus/files/python-pi-code.tar.gz
[userid@rocket.hpc ~]$ tar -xvzf python-pi-code.tar.gzor
BASH
[userid@rocket.hpc ~]$ wget https://nclrse-training.github.io/hpc-intro-cirrus/files/python-pi-code.tar.gz
[userid@rocket.hpc ~]$ tar -xvzf python-pi-code.tar.gzMethod 2: You can download a local copy of the files on your machine
and then use scp or rsync to copy the file
onto Rocket.
A Serial Solution to the Problem
We start from a Python script using concepts taught in Software Carpentry’s Programming with Python workshops. We want to allow the user to specify how many random points should be used to calculate π through a command-line parameter. This script will only use a single CPU for its entire run, so it’s classified as a serial process.
Let’s write a Python program, pi.py, to estimate π for
us. Start by importing the numpy module for calculating the
results, and the sys module to process command-line
parameters:
We define a Python function inside_circle that accepts a
single parameter for the number of random points used to calculate π.
See Programming
with Python: Creating Functions for a review of Python functions. It
randomly samples points with both x and y on the
half-open interval [0, 1). It then computes their distances from the
origin (i.e., radii), and returns how many of those distances were less
than or equal to 1.0. All of this is done using vectors of
double-precision (64-bit) floating-point values.
PYTHON
def inside_circle(total_count):
x = np.random.uniform(size=total_count)
y = np.random.uniform(size=total_count)
radii = np.sqrt(x * x + y * y)
count = len(radii[np.where(radii<=1.0)])
return countNext, we create a main function to call the
inside_circle function and calculate π from its returned
result. See Programming
with Python: Command-Line Programs for a review of main
functions and parsing command-line parameters.
PYTHON
def main():
n_samples = int(sys.argv[1])
counts = inside_circle(n_samples)
my_pi = 4.0 * counts / n_samples
print(my_pi)
if __name__ == '__main__':
main()Run the code on your development machine (e.g. your laptop)
A normal workflow would be to develop and run scripts on your own
machine, then move the working code up to HPC if more resource is needed
to run it. If you have Python installed on your lapotop, feel free to
try this out: If we run the Python script locally with a command-line
parameter, as in python pi.py 1024, we should see the
script print its estimate of π:
Try out code on the login node ?
We only run small test jobs on the login node. Rather than have the whole class attempt this and block up the login node, your instructor will run the code as a demonstration: :::solution on Rocket, software is only available via modules, so we need to load Python3 before we start:
:::
Random Number Generation
Challenge
In the preceding code, random numbers are conveniently generated using the built-in capabilities of NumPy. In general, random-number generation is difficult to do well, it’s easy to accidentally introduce correlations into the generated sequence.
- Discuss why generating high quality random numbers might be difficult.
- Is the quality of random numbers generated sufficient for estimating π in this implementation?
- Computers are deterministic and produce pseudo random numbers using an algorithm. The choice of algorithm and its parameters determines how random the generated numbers are. Pseudo random number generation algorithms usually produce a sequence numbers taking the previous output as an input for generating the next number. At some point the sequence of pseudo random numbers will repeat, so care is required to make sure the repetition period is long and that the generated numbers have statistical properties similar to those of true random numbers.
- Yes.
Measuring Performance of the Serial Solution
The stochastic method used to estimate π should converge on the true
value as the number of random points increases. But as the number of
points increases, creating the variables x, y,
and radii requires more time and more memory. Eventually,
the memory required may exceed what’s available on our local laptop or
desktop, or the time required may be too long to meet a deadline. So
we’d like to take some measurements of how much memory and time the
script requires, and later take the same measurements after creating a
parallel version of the script to see the benefits of parallelizing the
calculations required.
Estimating Memory Requirements
Since the largest variables in the script are x,
y, and radii, each containing
n_samples points, we’ll modify the script to report their
total memory required. Each point in x, y, or
radii is stored as a NumPy float64, we can use
NumPy’s dtype
function to calculate the size of a float64.
Replace the print(my_pi) line with the following:
PYTHON
size_of_float = np.dtype(np.float64).itemsize
memory_required = 3 * n_samples * size_of_float / (1024**3)
print(f"Pi: {my_pi}, memory: {memory_required} GiB")The first line calculates the bytes of memory required for a single
64-bit floating point number using the dtype function. The
second line estimates the total amount of memory required to store three
variables containing n_samples float64 values,
converting the value into units of gibibytes.
The third line prints both the estimate of π and the estimated amount of
memory used by the script.
The updated Python script is:
PYTHON
import numpy as np
import sys
def inside_circle(total_count):
x = np.random.uniform(size=total_count)
y = np.random.uniform(size=total_count)
radii = np.sqrt(x * x + y * y)
count = len(radii[np.where(radii<=1.0)])
return count
def main():
n_samples = int(sys.argv[1])
counts = inside_circle(n_samples)
my_pi = 4.0 * counts / n_samples
size_of_float = np.dtype(np.float64).itemsize
memory_required = 3 * n_samples * size_of_float / (1024**3)
print(f"Pi: {my_pi}, memory: {memory_required} GiB")
if __name__ == '__main__':
main()Run the script again with a few different values for the number of samples, and see how the memory required changes:
BASH
[user@laptop ~]$ python pi.py 1000
Pi: 3.144, memory: 2.2351741790771484e-05 GiB
[user@laptop ~]$ python pi.py 2000
Pi: 3.18, memory: 4.470348358154297e-05 GiB
[user@laptop ~]$ python pi.py 1000000
Pi: 3.140944, memory: 0.022351741790771484 GiB
[user@laptop ~]$ python pi.py 100000000
Pi: 3.14182724, memory: 2.2351741790771484 GiBHere we can see that the estimated amount of memory required scales
linearly with the number of samples used. In practice, there is some
memory required for other parts of the script, but the x,
y, and radii variables are by far the largest
influence on the total amount of memory required.
Estimating Calculation Time
Most of the calculations required to estimate π are in the
inside_circle function:
- Generating
n_samplesrandom values forxandy. - Calculating
n_samplesvalues ofradiifromxandy. - Counting how many values in
radiiare under 1.0.
There’s also one multiplication operation and one division operation
required to convert the counts value to the final estimate
of π in the main function.
A simple way to measure the calculation time is to use Python’s
datetime module to store the computer’s current date and
time before and after the calculations, and calculate the difference
between those times.
To add the time measurement to the script, add the following line
below the import sys line:
Then, add the following line immediately above the line calculating
counts:
Add the following two lines immediately below the line calculating
counts:
And finally, modify the print statement with the
following:
The final Python script for the serial solution is:
PYTHON
import numpy as np
import sys
import datetime
def inside_circle(total_count):
x = np.random.uniform(size=total_count)
y = np.random.uniform(size=total_count)
radii = np.sqrt(x * x + y * y)
count = len(radii[np.where(radii<=1.0)])
return count
def main():
n_samples = int(sys.argv[1])
start_time = datetime.datetime.now()
counts = inside_circle(n_samples)
my_pi = 4.0 * counts / n_samples
end_time = datetime.datetime.now()
elapsed_time = (end_time - start_time).total_seconds()
size_of_float = np.dtype(np.float64).itemsize
memory_required = 3 * n_samples * size_of_float / (1024**3)
print(f"Pi: {my_pi}, memory: {memory_required} GiB, time: {elapsed_time} s")
if __name__ == '__main__':
main()Run the script again with a few different values for the number of samples, and see how the solution time changes:
PYTHON
[user@laptop ~]$ python pi.py 1000000
Pi: 3.139612, memory: 0.022351741790771484 GiB, time: 0.034872 s
[user@laptop ~]$ python pi.py 10000000
Pi: 3.1425492, memory: 0.22351741790771484 GiB, time: 0.351212 s
[user@laptop ~]$ python pi.py 100000000
Pi: 3.14146608, memory: 2.2351741790771484 GiB, time: 3.735195 sHere we can see that the amount of time required scales approximately linearly with the number of samples used. There could be some variation in additional runs of the script with the same number of samples, since the elapsed time is affected by other programs running on the computer at the same time. But if the script is the most computationally-intensive process running at the time, its calculations are the largest influence on the elapsed time.
Now that we’ve developed our initial script to estimate π, we can see that as we increase the number of samples:
- The estimate of π tends to become more accurate.
- The amount of memory required scales approximately linearly.
- The amount of time to calculate scales approximately linearly.
In general, achieving a better estimate of π requires a greater
number of points. Take a closer look at inside_circle:
should we expect to get high accuracy on a single machine?
Probably not. The function allocates three arrays of size N equal to the number of points belonging to this process. Using 64-bit floating point numbers, the memory footprint of these arrays can get quite large. Each 100,000,000 points sampled consumes 2.24 GiB of memory. Sampling 400,000,000 points consumes 8.94 GiB of memory, and if your machine has less RAM than that, it will grind to a halt. If you have 16 GiB installed, you won’t quite make it to 750,000,000 points.
Running the Serial Job on a Compute Node
Replicate the pi.py script in the
/nobackup/proj/training/userid space on Rocket. Guidance on
how to do this can be found at the beginning of this episode.
Create a submission file, requesting one task on a single node. If we
do not specify a maximum walltime for the job using
--time=<hh:mm:ss> then the job will be submitted with
the short default maximum time of 1 minute (NB partition
names and default time limits will vary between HPC systems).
OUTPUT
#!/bin/bash
#SBATCH --partition=short
#SBATCH --job-name serial-pi
#SBATCH --nodes=1
#SBATCH --tasks-per-node=1
# Load the correct Python module
module load python/3.9.13
# Execute the task
python3 pi.py 100000000Memory Requirements
On some HPC systems you may need to specify the memory requirements
of the job using the --mem, --mem-per-cpu,
--mem-per-gpu options. However, on Cirrus you cannot
specify the memory for a job. The amount of memory you are assigned is
calculated from the amount of primary resource you request.
The primary resource you request on standard compute nodes are CPU cores. The maximum amount of memory you are allocated is computed as the number of CPU cores you requested multiplied by 1/22 of the total memory available (as there are 22 CPU cores per node). So, if you request a full standard node (22 cores), then you will be allocated a maximum of all of the memory (128 GB) available on the node; however, if you request 1 core, then you will be assigned a maximum of 128/22 = 2.9 GB of the memory available on the node.e.
Then submit your job.
As before, use the status commands to check when your job runs. Use
ls to locate the output file, and examine it. Is it what
you expected?
- How good is the value for π?
- How much memory did it need?
- How long did the job take to run?
Modify the job script to increase both the number of samples (perhaps by a factor of 2, then by a factor of 10), and resubmit the job each time.
- How good is the value for π?
- How much memory did it need?
- Did you encounter any errors?
Even with sufficient memory for necessary variables, a script could require enormous amounts of time to calculate on a single CPU. To reduce the amount of time required, we need to modify the script to use multiple CPUs for the calculations. In the largest problem scales, we could use multiple CPUs in multiple compute nodes, distributing the memory requirements across all the nodes used to calculate the solution.
Running the Parallel Job
We will run an example that uses the Message Passing Interface (MPI) for parallelism – this is a common tool on HPC systems.
What is MPI?
The Message Passing Interface is a set of tools which allow multiple parallel jobs to communicate with each other. Typically, a single executable is run multiple times, possibly on different machines, and the MPI tools are used to inform each instance of the executable about how many instances there are, which instance it is. MPI also provides tools to allow communication and coordination between instances. An MPI instance typically has its own copy of all the local variables.
While MPI jobs can generally be run as stand-alone executables, in
order for them to run in parallel they must use an MPI run-time
system, which is a specific implementation of the MPI
standard. To do this, they should be started via a command such
as mpiexec (or mpirun, or srun,
etc. depending on the MPI run-time you need to use), which will ensure
that the appropriate run-time support for parallelism is included.
MPI Runtime Arguments
On their own, commands such as mpiexec can take many
arguments specifying how many machines will participate in the
execution, and you might need these if you would like to run an MPI
program on your laptop (for example). In the context of a queuing
system, however, it is frequently the case that we do not need to
specify this information as the MPI run-time will have been configured
to obtain it from the queuing system, by examining the environment
variables set when the job is launched.
What Changes Are Needed for an MPI Version of the π Calculator?
First, we need to import the MPI object from the Python
module mpi4py by adding an
from mpi4py import MPI line immediately below the
import datetime line.
Second, we need to modify the “main” function to perform the overhead and accounting work required to:
- subdivide the total number of points to be sampled,
- partition the total workload among the various parallel processors available,
- have each parallel process report the results of its workload back to the “rank 0” process, which does the final calculations and prints out the result.
The modifications to the serial script demonstrate four important concepts:
- COMM_WORLD: the default MPI Communicator, providing a channel for
all the processes involved in this
mpiexecto exchange information with one another. - Scatter: A collective operation in which an array of data on one MPI rank is divided up, with separate portions being sent out to the partner ranks. Each partner rank receives data from the matching index of the host array.
- Gather: The inverse of scatter. One rank populates a local array, with the array element at each index assigned the value provided by the corresponding partner rank – including the host’s own value.
- Conditional Output: since every rank is running the same
code, the partitioning, the final calculations, and the
printstatement are wrapped in a conditional so that only one rank performs these operations.
We add the lines:
immediately before the n_samples line to set up the MPI
environment for each process.
We replace the start_time and counts lines
with the lines:
PYTHON
if rank == 0:
start_time = datetime.datetime.now()
partitions = [ int(n_samples / cpus) ] * cpus
counts = [ int(0) ] * cpus
else:
partitions = None
counts = NoneThis ensures that only the rank 0 process measures times and
coordinates the work to be distributed to all the ranks, while the other
ranks get placeholder values for the partitions and
counts variables.
Immediately below these lines, let’s
- distribute the work among the ranks with MPI
scatter, - call the
inside_circlefunction so each rank can perform its share of the work, - collect each rank’s results into a
countsvariable on rank 0 using MPIgather.
by adding the following three lines:
PYTHON
partition_item = comm.scatter(partitions, root=0)
count_item = inside_circle(partition_item)
counts = comm.gather(count_item, root=0)Illustrations of these steps are shown below.
The Parallel Message Passing Interface (MPI) Process
Step 1: Setup the MPI environment and initialize local variables – including the vector containing the number of points to generate on each parallel processor:

Step 2: Distribute the number of points from the originating vector to all the parallel processors:

Step 3: Perform the computation in parallel:

Step 4: Retrieve counts from all the parallel processes:

Step 5: Print out the report:

Finally, we’ll ensure the my_pi through
print lines only run on rank 0. Otherwise, every parallel
processor will print its local value, and the report will become
hopelessly garbled:
if rank == 0:
my_pi = 4.0 * sum(counts) / sum(partitions)
end_time = datetime.datetime.now()
elapsed_time = (end_time - start_time).total_seconds()
size_of_float = np.dtype(np.float64).itemsize
memory_required = 3 * sum(partitions) * size_of_float / (1024**3)
pi_specific = np.pi
accuracy = 100*(1-my_pi/pi_specific)
print(f"Pi: {my_pi:6f}, memory: {memory_required:6f} GiB, time: {elapsed_time:6f} s, error: {accuracy:6f}%")A fully commented version of the final MPI parallel python code is available: pi-mpi-cirrus.py.
Our purpose here is to exercise the parallel workflow of the cluster, not to optimize the program to minimize its memory footprint. Rather than push our local machines to the breaking point (or, worse, the login node), let’s give it to a cluster node with more resources.
Create a submission file, requesting more than one task on a single node:
OUTPUT
#!/bin/bash
#SBATCH --partition=short
#SBATCH --job-name parallel-pi
#SBATCH --nodes=1
#SBATCH --tasks-per-node=4
#SBATCH --time=00:01
# Load the correct Python module
module load python/3.9.13
# Execute the task
srun python pi-mpi-cirrus.py 100000000Then submit your job.
As before, use the status commands to check when your job runs. Use
ls to locate the output file, and examine it. Is it what
you expected?
- How good is the value for π?
- How much memory did it need?
- How much faster was this run than the serial run with 100000000 points?
Modify the job script to increase the number of samples (perhaps by a factor of 2, then by a factor of 10), and resubmit the job each time. You can also increase the number of CPUs.
- How good is the value for π?
- How much memory did it need?
- How long did the job take to run?
How Much Does MPI Improve Performance?
In theory, by dividing up the π calculations among n MPI processes, we should see run times reduce by a factor of n. In practice, some time is required to start the additional MPI processes, for the MPI processes to communicate and coordinate, and some types of calculations may only be able to run effectively on a single CPU.
Additionally, if the MPI processes operate on different physical CPUs in the computer, or across multiple compute nodes, additional time is required for communication compared to all processes operating on a single CPU.
Amdahl’s Law is one way of predicting improvements in execution time for a fixed parallel workload. If a workload needs 20 hours to complete on a single core, and one hour of that time is spent on tasks that cannot be parallelized, only the remaining 19 hours could be parallelized. Even if an infinite number of cores were used for the parallel parts of the workload, the total run time cannot be less than one hour.
In practice, it’s common to evaluate the parallelism of an MPI program by
- running the program across a range of CPU counts,
- recording the execution time on each run,
- comparing each execution time to the time when using a single CPU.
The speedup factor S is calculated as the single-CPU execution time divided by the multi-CPU execution time. For a laptop with 8 cores, the graph of speedup factor versus number of cores used shows relatively consistent improvement when using 2, 4, or 8 cores, but using additional cores shows a diminishing return.
Laptop performance
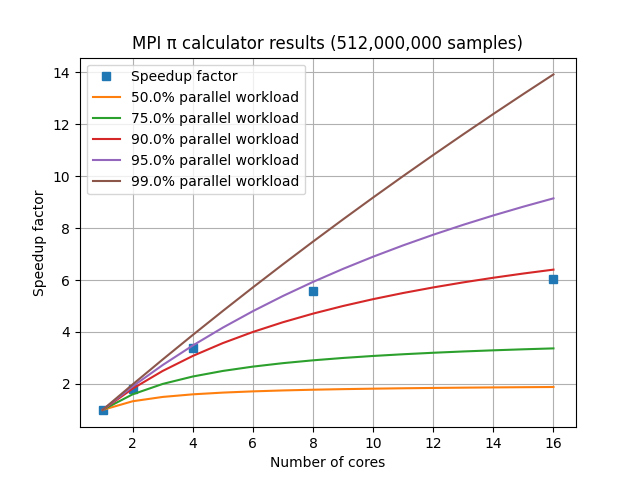
For a set of HPC nodes containing 28 cores each, the graph of speedup factor versus number of cores shows consistent improvements up through three nodes and 84 cores, but worse performance when adding a fourth node with an additional 28 cores. This is due to the amount of communication and coordination required among the MPI processes requiring more time than is gained by reducing the amount of work each MPI process has to complete. This communication overhead is not included in Amdahl’s Law.
HPC performance
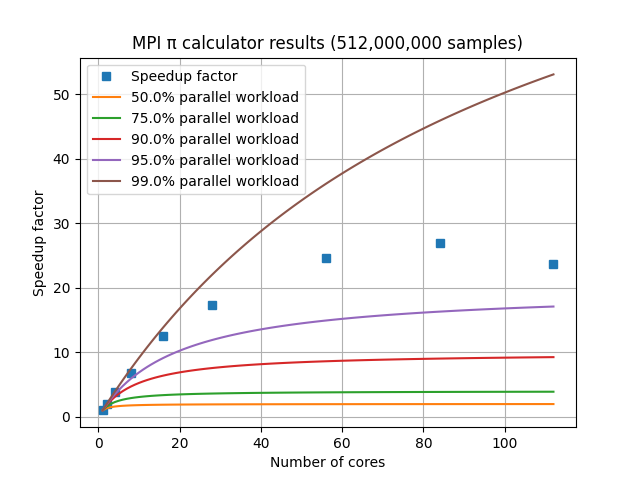
In practice, MPI speedup factors are influenced by:
- CPU design,
- the communication network between compute nodes,
- the MPI library implementations, and
- the details of the MPI program itself.
In an HPC environment, we try to reduce the execution time for all types of jobs, and MPI is an extremely common way to combine dozens, hundreds, or thousands of CPUs into solving a single problem. To learn more about parallelization, see the parallel novice lesson lesson.
- “Parallel programming allows applications to take advantage of parallel hardware; serial code will not ‘just work.’”
- “Distributed memory parallelism is a common case, using the Message Passing Interface (MPI).”
- “The queuing system facilitates executing parallel tasks.”
- “Performance improvements from parallel execution do not scale linearly.”
Content from Using resources effectively
Last updated on 2025-02-14 | Edit this page
Overview
Questions
- How do we monitor our jobs?
- How can I get my jobs scheduled more easily?
Objectives
- Understand how to look up job statistics and profile code.
- Understand job size implications.
We’ve touched on all the skills you need to interact with an HPC cluster: logging in over SSH, loading software modules, submitting parallel jobs, and finding the output. Let’s learn about estimating resource usage and why it might matter. To do this we need to understand the basics of benchmarking. Benchmarking is essentially performing simple experiments to help understand how the performance of our work varies as we change the properties of the jobs on the cluster - including input parameters, job options and resources used.
Our example
In the rest of this episode, we will use an example parallel application that calculates an estimate of the value of Pi. Although this is a toy problem, it exhibits all the properties of a full parallel application that we are interested in for this course.
The main resource we will consider here is the use of compute core time as this is the resource you are usually charged for on HPC resources. However, other resources - such as memory use - may also have a bearing on how you choose resources and constrain your choice.
For those that have come across HPC benchmarking before, you may be aware that people often make a distinction between strong scaling and weak scaling:
- Strong scaling is where the problem size (i.e. the application) stays the same size and we try to use more cores to solve the problem faster.
- Weak scaling is where the problem size increases at the same rate as we increase the core count so we are using more cores to solve a larger problem.
Both of these approaches are equally valid uses of HPC. This example looks at strong scaling.
Before we work on benchmarking, it is useful to define some terms for the example we will be using
-
Program The computer program we are executing
(
pi-mpi.pyin the examples below) - Application The combination of computer program with particular input parameters
Accessing the software and input
Required Files
The program used in this example can be retrieved using wget or a browser and copied to the remote.
Using wget:
BASH
[username3@login02 ]$ wget http://training.researchcomputing.ncl.ac.uk/training-materials/pi-mpi.pyUsing a web browser:
http://training.researchcomputing.ncl.ac.uk/training-materials/pi-mpi.py
Baseline: running in serial
Before starting to benchmark an application to understand what resources are best to use, you need a baseline performance result. In more formal benchmarking, your baseline is usually the minimum number of cores or nodes you can run on. However, for understanding how best to use resources, as we are doing here, your baseline could be the performance on any number of cores or nodes that you can measure the change in performance from.
Our pi-mpi.py application is small enough that we can
run a serial (i.e. using a single core) job for our baseline performance
so that is where we will start
Run a single core job
Write a job submission script that runs the pi-mpi.py
application on a single core. You will need to take an initial guess as
to the walltime to request to give the job time to complete. Submit the
job and check the contents of the STDOUT file to see if the application
worked or not.
Creating a file called submit-pi-mpi.slurm:
BASH
#!/bin/bash
#SBATCH --partition=short
#SBATCH --job-name=pi-mpi
#SBATCH --nodes=1
#SBATCH --tasks-per-node=1
#SBATCH --time=00:15:00
srun python pi-mpi.py 10000000Run application using a single process (i.e. in serial) with a
blocking srun command:
BASH
module load cray-python
[userid@login01 userid]$ srun --partition=short python pi-mpi.py 10000000Submit with to the batch queue with:
Output in the job log should look something like:
OUTPUT
Generating 10000000 samples.
Rank 0 generating 10000000 samples on host nid001246.
Numpy Pi: 3.141592653589793
My Estimate of Pi: 3.1416708
1 core(s), 10000000 samples, 228.881836 MiB memory, 0.423903 seconds, -0.002487% errorOnce your job has run, you should look in the output to identify the
performance. Most HPC programs should print out timing or performance
information (usually somewhere near the bottom of the summary output)
and pi-mpi.py is no exception. You should see two lines in
the output that look something like:
BASH
256 core(s), 100000000 samples, 2288.818359 MiB memory, 0.135041 seconds, -0.004774% error
Total run time=0.18654435999997077sYou can also get an estimate of the overall run time from the final
job statistics. If we look at how long the finished job ran for, this
will provide a quick way to see roughly what the runtime was. This can
be useful if you want to know quickly if a job was faster or not than a
previous job (as you do not have to find the output file to look up the
performance) but the number is not as accurate as the performance
recorded by the application itself and also includes static overheads
from running the job (such as loading modules and startup time) that can
skew the timings. To do this on use sacct -l -j 12345 with
the job ID, e.g.:
OUTPUT
JOBID USER ACCOUNT NAME ST REASON START_TIME T...
36856 yourUsername yourAccount example-job.sh R None 2017-07-01T16:47:02 ...Running in parallel and benchmarking performance
We have now managed to run the pi-mpi.py application
using a single core and have a baseline performance we can use to judge
how well we are using resources on the system.
Note that we also now have a good estimate of how long the application takes to run so we can provide a better setting for the walltime for future jobs we submit. Lets now look at how the runtime varies with core count.
Benchmarking the parallel performance
Modify your job script to run on multiple cores and evaluate the
performance of pi-mpi.py on a variety of different core
counts and use multiple runs to complete a table like the one below. If
you examine the log file you will see that it contains two timings: the
total time taken by the entire program and the time taken solely by the
calculation. The calculation of Pi from the Monte-Carlo counts is not
parallelised so this is a serial overhead, performed by a single
processor. The calculation part is, in theory, perfectly parallel (each
processor operates on independent sets of unique random numbers ) so
this should get faster on more cores. The Calculation core seconds is
the calculation time multiplied by the number of cores.
| Cores | Overall run time (s) | Calculation time (s) | Calculation core seconds |
|---|---|---|---|
| 1 (serial) | |||
| 2 | |||
| 4 | |||
| 8 | |||
| 16 | |||
| 32 | |||
| 64 | |||
| 128 | |||
| 256 |
Look at your results – do they make sense? Given the structure of the code, you would expect the performance of the calculation to increase linearly with the number of cores: this would give a roughly constant figure for the Calculation core seconds. Is this what you observe?
The table below shows example timings for runs on ARCHER2 (HPC at Edinburgh)
| Cores | Overall run time (s) | Calculation time (s) | Calculation core seconds |
|---|---|---|---|
| 1 | 3.931 | 3.854 | 3.854 |
| 2 | 2.002 | 1.930 | 3.859 |
| 4 | 1.048 | 0.972 | 3.888 |
| 8 | 0.572 | 0.495 | 3.958 |
| 16 | 0.613 | 0.536 | 8.574 |
| 32 | 0.360 | 0.278 | 8.880 |
| 64 | 0.249 | 0.163 | 10.400 |
| 128 | 0.170 | 0.083 | 10.624 |
| 256 | 0.187 | 0.135 | 34.560 |
Understanding the performance
Now we have some data showing the performance of our application we need to try and draw some useful conclusions as to what the most efficient set of resources are to use for our jobs. To do this we introduce two metrics:
- Actual speedup The ratio of the baseline runtime (or runtime on the lowest core count) to the runtime at the specified core count. i.e. baseline runtime divided by runtime at the specified core count.
- Ideal speedup The expected speedup if the application showed perfect scaling. i.e. if you double the number of cores, the application should run twice as fast.
- Parallel efficiency The fraction of ideal speedup actually obtained for a given core count. This gives an indication of how well you are exploiting the additional resources you are using.
We will now use our performance results to compute these two metrics for the sharpen application and use the metrics to evaluate the performance and make some decisions about the most effective use of resources.
Computing the speedup and parallel efficiency
Use your Overall run times from above to fill in a table like the one below.
| Cores | Overall run time (s) | Actual speedup | Ideal speedup | Parallel efficiency |
|---|---|---|---|---|
| 1 (serial) | \(t_{c1}\) | - | 1 | 1 |
| 2 | \(t_{c2}\) | \(s_2 = t_{c1}/t_{c2}\) | \(i_2 = 2\) | \(s_2 / i_2\) |
| 4 | \(t_{c4}\) | \(s_4 = t_{c1}/t_{c4}\) | \(i_4 = 4\) | \(s_4 / i_4\) |
| 8 | ||||
| 16 | ||||
| 32 | ||||
| 64 | ||||
| 128 | ||||
| 256 |
Given your results, try to answer the following questions:
- What is the core count where you get the most efficient use of resources, irrespective of run time?
- What is the core count where you get the fastest solution, irrespective of efficiency?
- What do you think a good core count choice would be for this application that balances time to solution and efficiency? Why did you choose this option?
The table below gives example results for ARCHER2 (HPC at Edinburgh) based on the example runtimes given in the solution above.
| Cores | Overall run time (s) | Actual speedup | Ideal speedup | Parallel efficiency |
|---|---|---|---|---|
| 1 | 3.931 | 1.000 | 1.000 | 1.000 |
| 2 | 2.002 | 1.963 | 2.000 | 0.982 |
| 4 | 1.048 | 3.751 | 4.000 | 0.938 |
| 8 | 0.572 | 6.872 | 8.000 | 0.859 |
| 16 | 0.613 | 6.408 | 16.000 | 0.401 |
| 32 | 0.360 | 10.928 | 32.000 | 0.342 |
| 64 | 0.249 | 15.767 | 64.000 | 0.246 |
| 128 | 0.170 | 23.122 | 128.000 | 0.181 |
| 256 | 0.187 | 21.077 | 256.000 | 0.082 |
What is the core count where you get the most efficient use of resources?
Just using a single core is the cheapest (and always will be unless your speedup is better than perfect – “super-linear” speedup). However, it may not be possible to run on small numbers of cores depending on how much memory you need or other technical constraints. Note: on most high-end systems, nodes are not shared between users. This means you are charged for all the CPU-cores on a node regardless of whether you actually use them. Typically we would be running on many hundreds of CPU-cores not a few tens, so the real question in practice is: what is the optimal number of nodes to use? ### What is the core count where you get the fastest solution, irrespective of efficiency? 256 cores gives the fastest time to solution. The fastest time to solution does not often make the most efficient use of resources so to use this option, you may end up wasting your resources. Sometimes, when there is time pressure to run the calculations, this may be a valid approach to running applications. ### What do you think a good core count choice would be for this application to use?
8 cores is probably a good number of cores to use with a parallel efficiency of 86%. Usually, the best choice is one that delivers good parallel efficiency with an acceptable time to solution. Note that acceptable time to solution differs depending on circumstances so this is something that the individual researcher will have to assess. Good parallel efficiency is often considered to be 70% or greater though many researchers will be happy to run in a regime with parallel efficiency greater than 60%. As noted above, running with worse parallel efficiency may also be useful if the time to solution is an overriding factor.
Tips
Here are a few tips to help you use resources effectively and efficiently on HPC systems:
- Know what your priority is: do you want the results as fast as possible or are you happy to wait longer but get more research for the resources you have been allocated?
- Use your real research application to benchmark but try to shorten the run so you can turn around your benchmarking runs in a short timescale. Ideally, it should run for 10-30 minutes; short enough to run quickly but long enough so the performance is not dominated by static startup overheads (though this is application dependent). Ways to do this potentially include, for example: using a smaller number of time steps, restricting the number of SCF cycles, restricting the number of optimisation steps.
- Use basic benchmarking to help define the best resource use for your application. One useful strategy: take the core count you are using as the baseline, halve the number of cores/nodes and rerun and then double the number of cores/nodes from your baseline and rerun. Use the three data points to assess your efficiency and the impact of different core/node counts.
- “The smaller your job, the faster it will schedule.”
Content from Using shared resources responsibly
Last updated on 2025-03-04 | Edit this page
Overview
Questions
- How can I be a responsible user?
- How can I protect my data?
- How can I best get large amounts of data off an HPC system?
Objectives
- Describe how the actions of a single user can affect the experience of others on a shared system.
- Learn how to be a considerate shared system citizen.
- Explain the importance of backing up critical data.
- Describe the challenges with transferring large amounts of data off HPC systems.
- Understand how to convert many files to a single archive file using tar.
One of the major differences between using remote HPC resources and your own system (e.g. your laptop) is that remote resources are shared. How many users the resource is shared between at any one time varies from system to system but it is unlikely you will ever be the only user logged into or using such a system.
The widespread usage of scheduling systems where users submit jobs on HPC resources is a natural outcome of the shared nature of these resources. There are other things you, as an upstanding member of the community, need to consider.
Be Kind to the Login Nodes
The login node is often busy managing all of the logged in users, creating and editing files and compiling software. If the machine runs out of memory or processing capacity, it will become very slow and unusable for everyone. While the machine is meant to be used, be sure to do so responsibly — in ways that will not adversely impact other users’ experience.
Login nodes are always the right place to launch jobs. Cluster policies vary, but they may also be used for proving out workflows, and in some cases, may host advanced cluster-specific debugging or development tools. The cluster may have modules that need to be loaded, possibly in a certain order, and paths or library versions that differ from your laptop, and doing an interactive test run on the head node is a quick and reliable way to discover and fix these issues.
You can always use the commands top and
ps ux to list the processes that are running on the login
node along with the amount of CPU and memory they are using. If this
check reveals that the login node is somewhat idle, you can safely use
it for your non-routine processing task. If something goes wrong — the
process takes too long, or doesn’t respond — you can use the
kill command along with the PID to terminate the
process.
Login Node Etiquette
Which of these commands would be a routine task to run on the login node?
python physics_sim.pymakecreate_directories.shmolecular_dynamics_2tar -xzf R-3.3.0.tar.gz
Building software, creating directories, and unpacking software are
common and acceptable tasks for the login node: options #2
(make), #3 (mkdir), and #5 (tar)
are probably OK. Note that script names do not always reflect their
contents: before launching #3, please
less create_directories.sh and make sure it’s not a Trojan
horse. Running resource-intensive applications is frowned upon. Unless
you are sure it will not affect other users, do not run jobs like #1
(python) or #4 (custom MD code). If you’re unsure, ask your
friendly sysadmin for advice.
If you experience performance issues with a login node you should report it to the system staff (usually via the helpdesk) for them to investigate.
Test Before Scaling
Remember that you are generally charged for usage on shared systems. A simple mistake in a job script can end up costing a large amount of resource budget. Imagine a job script with a mistake that makes it sit doing nothing for 24 hours on 1000 cores or one where you have requested 2000 cores by mistake and only use 100 of them! This problem can be compounded when people write scripts that automate job submission (for example, when running the same calculation or analysis over lots of different parameters or files). When this happens it hurts both you (as you waste lots of charged resource) and other users (who are blocked from accessing the idle compute nodes).
On very busy resources you may wait many days in a queue for your job to fail within 10 seconds of starting due to a trivial typo in the job script. This is extremely frustrating!
Most systems provide dedicated resources for testing that have short wait times to help you avoid this issue.
Test Job Submission Scripts That Use Large Amounts of Resources
Before submitting a large run of jobs, submit one as a test first to make sure everything works as expected.
Before submitting a very large or very long job submit a short truncated test to ensure that the job starts as expected.
Have a Backup Plan
Although many HPC systems keep backups, it does not always cover all the file systems available and may only be for disaster recovery purposes (i.e. for restoring the whole file system if lost rather than an individual file or directory you have deleted by mistake). Protecting critical data from corruption or deletion is primarily your responsibility: keep your own backup copies.
Version control systems (such as Git) often have free, cloud-based offerings (e.g., GitHub and GitLab) that are generally used for storing source code. Even if you are not writing your own programs, these can be very useful for storing job scripts, analysis scripts and small input files.
For larger amounts of data, you should make sure you have a robust
system in place for taking copies of critical data off the HPC system
wherever possible to backed-up storage. Tools such as rsync
can be very useful for this.
Newcastle University provides campus file storage with roll-back capability, mounted on Rocket under . Every project can register for 5TB for free, additional space is charged per TB per year.
Your access to the shared HPC system will generally be time-limited so you should ensure you have a plan for transferring your data off the system before your access finishes. The time required to transfer large amounts of data should not be underestimated and you should ensure you have planned for this early enough (ideally, before you even start using the system for your research).
In all these cases, the service desk of the system you are using should be able to provide useful guidance on your options for data transfer for the volumes of data you will be using.
Your Data Is Your Responsibility
Make sure you understand what the backup policy is on the file systems on the system you are using and what implications this has for your work if you lose your data on the system. Plan your backups of critical data and how you will transfer data off the system throughout the project.
On ARCHER2, the home file systems are backed up so you can restore data you deleted by mistake. A copy of the data on home file system is also kept off site for disaster recovery purposes. The work file systems are not backed up in any way.
Transferring Data
As mentioned above, many users run into the challenge of transferring large amounts of data off HPC systems at some point (this is more often in transferring data off than onto systems but the advice below applies in either case). Data transfer speed may be limited by many different factors so the best data transfer mechanism to use depends on the type of data being transferred and where the data is going.
The components between your data’s source and destination have varying levels of performance, and in particular, may have different capabilities with respect to bandwidth and latency.
Bandwidth is generally the raw amount of data per unit time a device is capable of transmitting or receiving. It’s a common and generally well-understood metric.
Latency is a bit more subtle. For data transfers, it may be thought of as the amount of time it takes to get data out of storage and into a transmittable form. Latency issues are the reason it’s advisable to execute data transfers by moving a small number of large files, rather than the converse.
Some of the key components and their associated issues are:
- Disk speed: File systems on HPC systems are often highly parallel, consisting of a very large number of high performance disk drives. This allows them to support a very high data bandwidth. Unless the remote system has a similar parallel file system you may find your transfer speed limited by disk performance at that end.
- Meta-data performance: Meta-data operations such as opening and closing files or listing the owner or size of a file are much less parallel than read/write operations. If your data consists of a very large number of small files you may find your transfer speed is limited by meta-data operations. Meta-data operations performed by other users of the system can also interact strongly with those you perform so reducing the number of such operations you use (by combining multiple files into a single file) may reduce variability in your transfer rates and increase transfer speeds.
- Network speed: Data transfer performance can be limited by network speed. More importantly it is limited by the slowest section of the network between source and destination. If you are transferring to your laptop/workstation, this is likely to be its connection (either via LAN or WiFi).
- Firewall speed: Most modern networks are protected by some form of firewall that filters out malicious traffic. This filtering has some overhead and can result in a reduction in data transfer performance. The needs of a general purpose network that hosts email/web-servers and desktop machines are quite different from a research network that needs to support high volume data transfers. If you are trying to transfer data to or from a host on a general purpose network you may find the firewall for that network will limit the transfer rate you can achieve.
As mentioned above, if you have related data that consists of a large
number of small files it is strongly recommended to pack the files into
a larger archive file for long term storage and transfer. A
single large file makes more efficient use of the file system and is
easier to move, copy and transfer because significantly fewer metadata
operations are required. Archive files can be created using tools like
tar and zip. We have already met
tar when we talked about data transfer earlier.
Consider the Best Way to Transfer Data
If you are transferring large amounts of data you will need to think about what may affect your transfer performance. It is always useful to run some tests that you can use to extrapolate how long it will take to transfer your data. Say you have a “data” folder containing 10,000 or so files, a healthy mix of small and large ASCII and binary data. Which of the following would be the best way to transfer them to Rocket?
- Using
scp?
- Using
rsync?
- Using
rsyncwith compression?
3.a. Using rsync with compression to transfer to a
mounted filesystem?
- Creating a
tararchive first forrsync?
BASH
[user@laptop ~]$ tar -cvf data.tar data
[user@laptop ~]$ rsync -raz data.tar userid@rocket.hpc:~/- Creating a compressed
tararchive forrsync?
Lets go through each option
-
scpwill recursively copy the directory. This works, but without compression. -
rsync -raworks likescp -r, but preserves file information like creation times. This is marginally better. -
rsync -razadds compression, which will save some bandwidth. If you have a strong CPU at both ends of the line, and you’re on a slow network, this is a good choice.
3.a) However on a fast network (for example transferring from Rocket to RDW, both within the data centre) it is faster to transfer without compression.--inplacetells rsync not to create a temporary file prior to sending but send the data straight away. The temporary file helps rsync resume when the connection is interrupted but at the cost of disk space and time to write this file. - This command first uses
tarto merge everything into a single file, thenrsync -zto transfer it with compression. With this large number of files, metadata overhead can hamper your transfer, so this is a good idea. - This command uses
tar -zto compress the archive, thenrsyncto transfer it. This may perform similarly to #4, but in most cases (for large datasets), it’s the best combination of high throughput and low latency (making the most of your time and network connection). However on a fast network (for example transferring from Rocket to RDW, both within the data centre) it is faster to transfer without compression.
Rsync Tips
--dry-run will show you what files would be changed,
without copying any data. Useful if you’re not sure you have the correct
path, or you are adding to / over-writing existing data.
Immediately re-running the same rsync command is a good way to check that the first run completed fully. No files will be copied if the first run was successful.
- “Be careful how you use the login node.”
- “Your data on the system is your responsibility.”
- “Plan and test large data transfers.”
- “It is often best to convert many files to a single archive file before transferring.”
- “Again, don’t run stuff on the login node.”